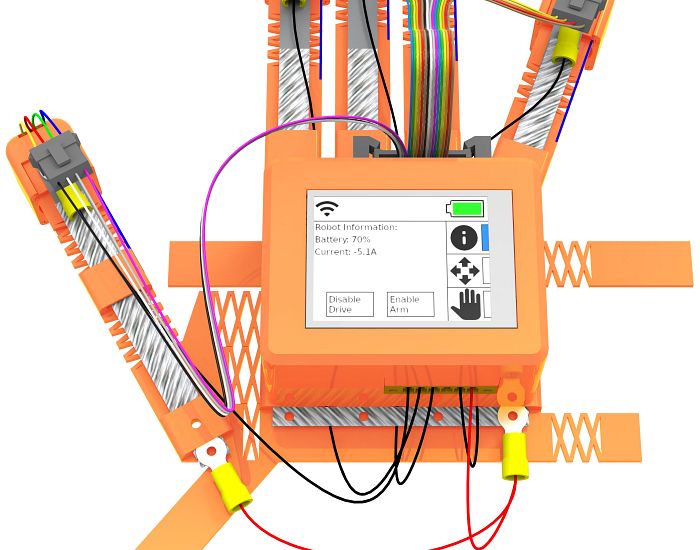
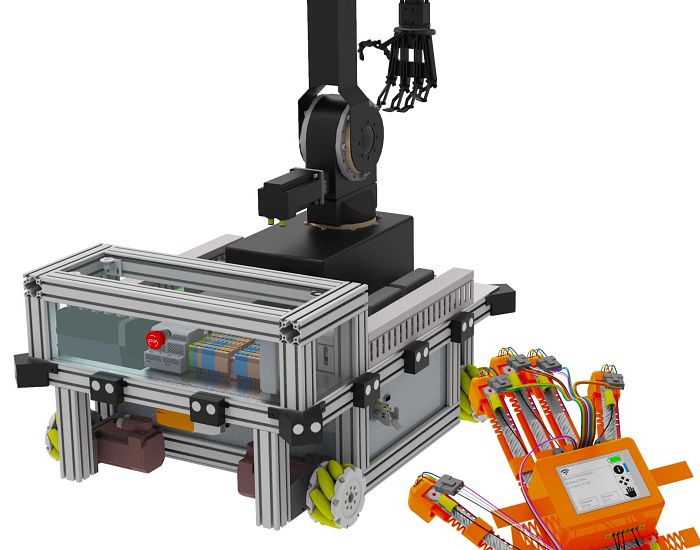
The objective of the project, which is part of our thesis work, is to develop a mobile robot system with gripper to complete handling tasks remotely. To this end, a glove equipped with sensors has been developed to allow user-friendly control by means of gestures.
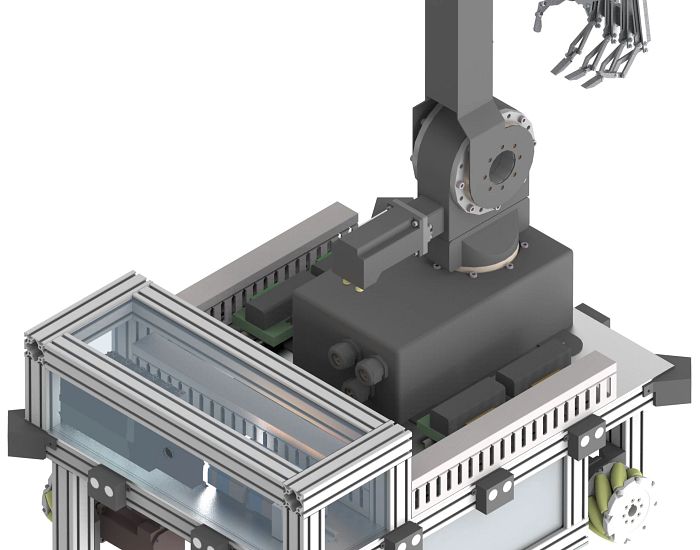
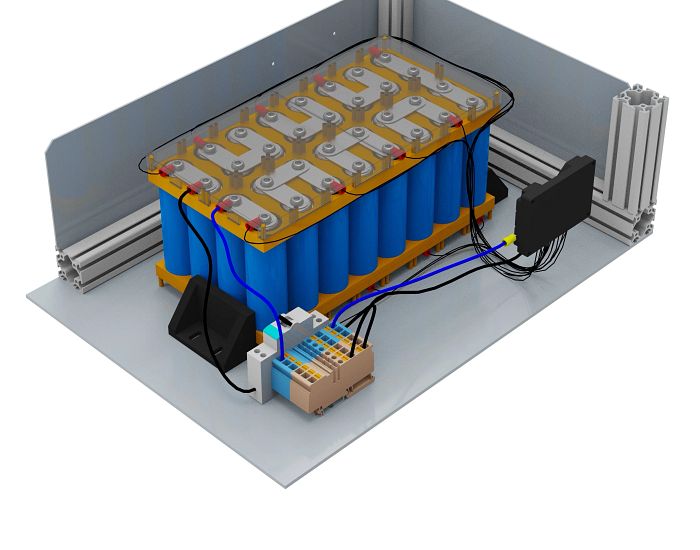
A drive system and battery system will be developed for the robot system, and a mechanical frame that can house all the components must be manufactured. A programmable logic controller is used to control the system, and the robot used is the one with Article Number “RL-D-RBT-5532S-BC-AE”.
The glove is manufactured from flexible plastic with a 3D printing process. It is also to be battery-operated and house all necessary electronic components to ensure maximum mobility.
Problem:
There are a large number of individuals who, in the course of practicing their profession or trade, must perform manual tasks that would be hazardous to their health if performed directly. Examples are doctors, during epidemics or pandemics, foresters, bomb disposal personnel and others who handle hazardous substances. In such cases, it is important that the system be as mobile as possible.
That is why we have set ourselves the objective of developing a system that allows teleoperation. Even though the time and budgetary limitations of our thesis work make it unlikely that we will develop such a system that can be used in the real world, we hope at least to create a prototype that could show how such a system could be implemented.
Solution:
This question is unfortunately difficult to answer, since there is no preceding process that has been automated. Our project concerns teleoperation which, by definition, eliminates automated processes, instead involving direct commands from the user.