English

Automated drilling machine for ladder rack legs for pickup truck caps.

Greenox Robotics integrates AI and robotics for efficient waste management. system and MRF (material recover facilities ) Our Greenox Vision system, featuring Igus Delta robots, operates in extreme conditions, ensuring high-speed sorting with minimal maintenance.
Greenox -https://greenoxtech.in/

The customer is looking for a gantry build for door accessories painting which does not requires much maintenance so they can have a better competitive advantage over what is offered by their rivals.
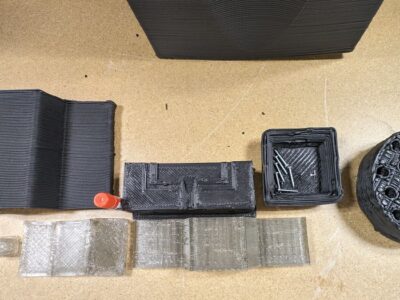
Our laboratory represents a significant leap forward in the manufacturing sector through the integration of additive manufacturing technologies. We are equipped with an advanced large-format Fused Deposition Modeling (FDM) gantry system, which serves as a critical asset for 3D printing a wide variety of items with high precision. The gantry systems accuracy is crucial, as it ensures that each model—carefully designed and sliced—is accurately reproduced by the control system throughout the printing process. Our facility excels in rapid prototyping and the fabrication of functional components, showcasing our dedication to pushing the boundaries of innovation and excellence in additive manufacturing.
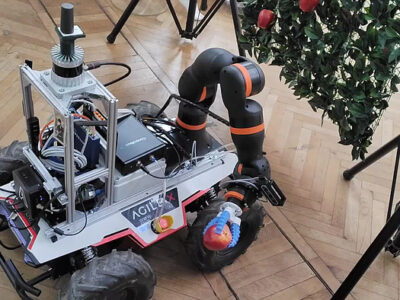
This research project investigates the application of autonomous fruit picking within a controlled, simulated espalier apple orchard environment. The orchard features apple trees trained to grow flat against vertical trellises, mimicking the structured layout commonly found in commercial orchards. This standardized environment allows for precise testing and refinement of the robotic fruit-picking system. The mobile robotic platform, equipped with the Igus Rebel 6-DoF robotic arm and advanced sensing capabilities, navigates the orchard rows, accurately identifying and harvesting ripe apples. The system employs a stereo depth camera for perception and a soft pneumatic gripper actuator for grasping the fruits on the tree.

This project is meant for any facility that has automation or needs troubleshooting to mitigate downtime and expenses.

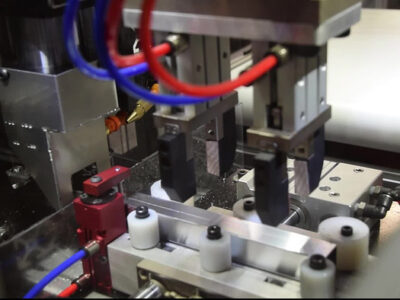
Dispensing robot for pharmacies. Dispenses quickly and efficiently with only 2 motors any type of medicine box.

AUTOMATIC CUT-OFF SAW FOR CUTTING ROCK SAMPLES. WE WERE LOOKING FOR A PRECISE, FAST AND EFFICIENT CUT, WITH A MAXIMUM OF OPTIONS THAT SIMPLIFY THE OPERATORS WORK (LESS PHYSICAL WEAR AND TEAR), AND INCREASE HIS PRODUCTIVITY. ALSO SOUGHT MATERIALS CAPABLE OF WITHSTANDING VERY HUMID, SALINE AND DUSTY ENVIRONMENTS (RESULTING FROM ROCK CUTTING).