HTL Rennweg
Der ScrewRover soll mittels Einsatzes modernster Technologien die Schrauben von Rollfeld-Leuchten auf den Start- und Landebahnen autonom nachziehen. Um die Schrauben festzuziehen, wird einen Protalroboter mit einem 3D gedruckten Akkuschrauber Tool verwendet. Durch den Vison-Sensor, werden mittels einer KI (Machine Learning) die Schrauben und dessen genauen Positionen erkannt. Diese Daten werden an die Robotersteuerung gesendet, wodurch diesen Koordinaten durch das igus Robot Control Programm nach einander exakt angefahren und nachgezogen werden.
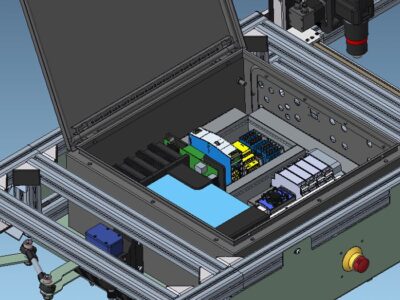
Um von einer zur nächsten Rollfeld-Leuchte zu kommen, wird ein eigens entwickeltes rein elektrisches Fahrzeug verwendet. Dieses besteht aus 4 Motoren und einer selbst entwickelten mechanischen Lenkung, welche durch einen Servomotor gesteuert wird. Das Grundgerüst des Fahrzeugs besteht aus Aluminiumprofilen, die eine einfache Demontage für den Transport ermöglichen und dabei helfen das Projekt kostengünstig zu gestalten. Der Prototyp wird mittels einer Fernsteuerung grob über einer Leuchte positioniert und schraubt dann autonom die Schrauben fest.