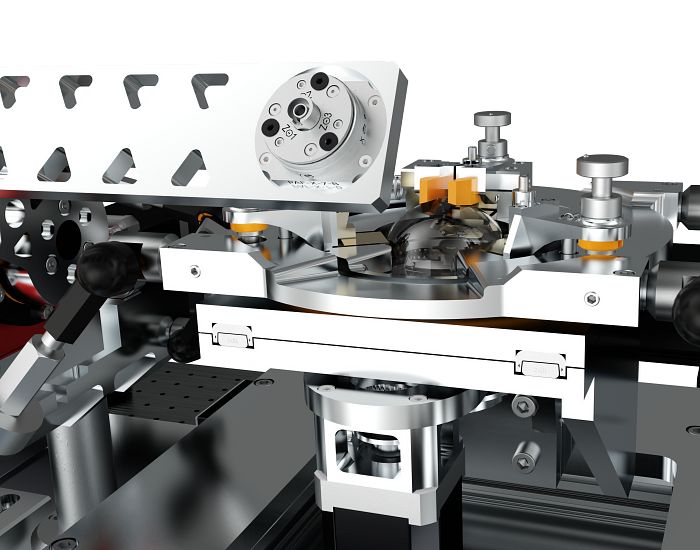
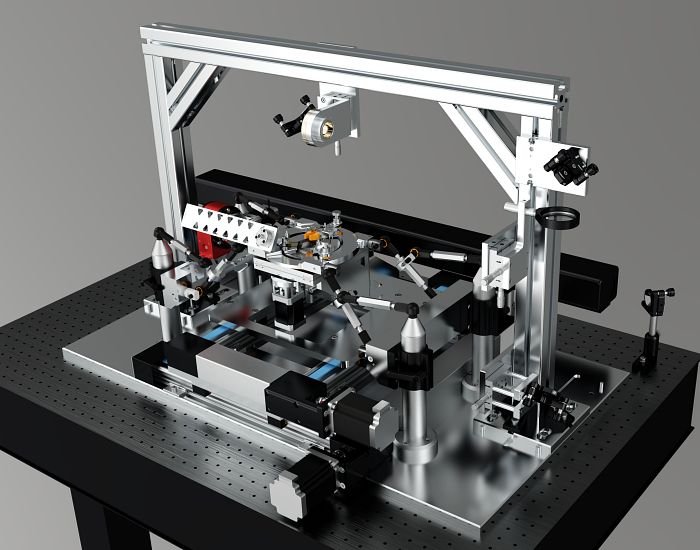
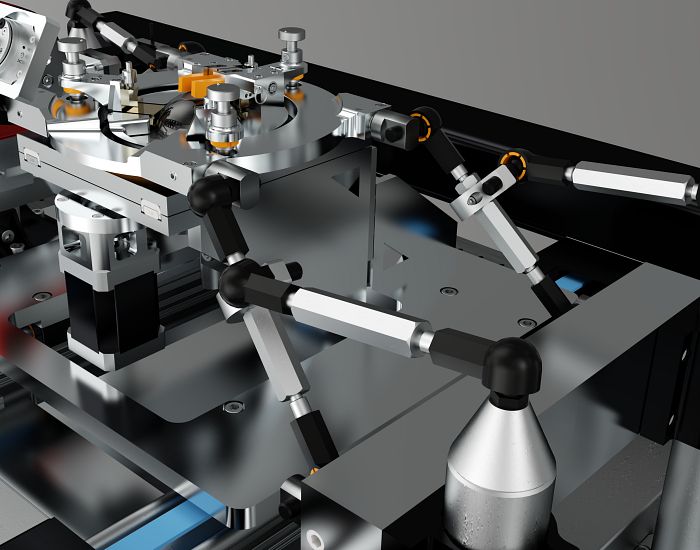
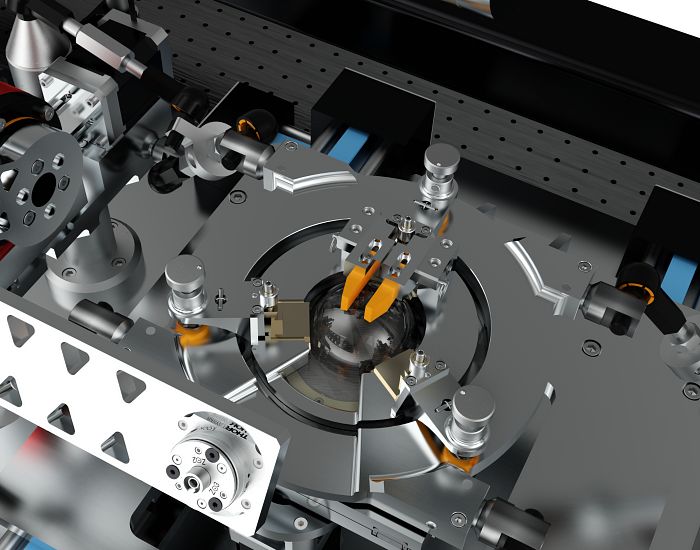
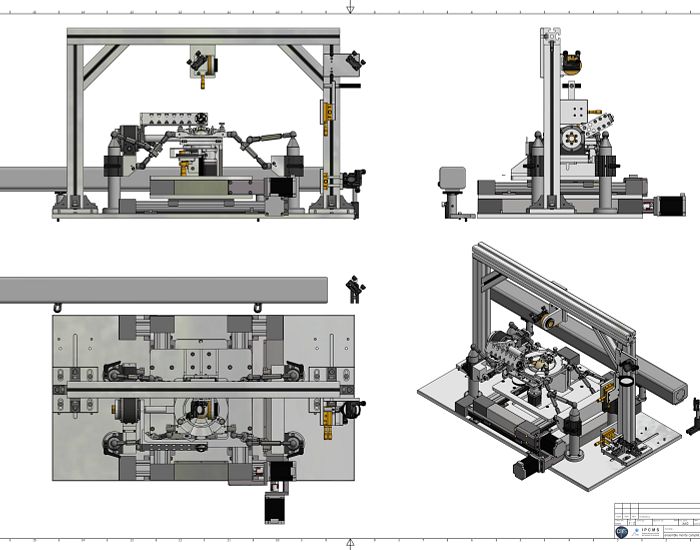
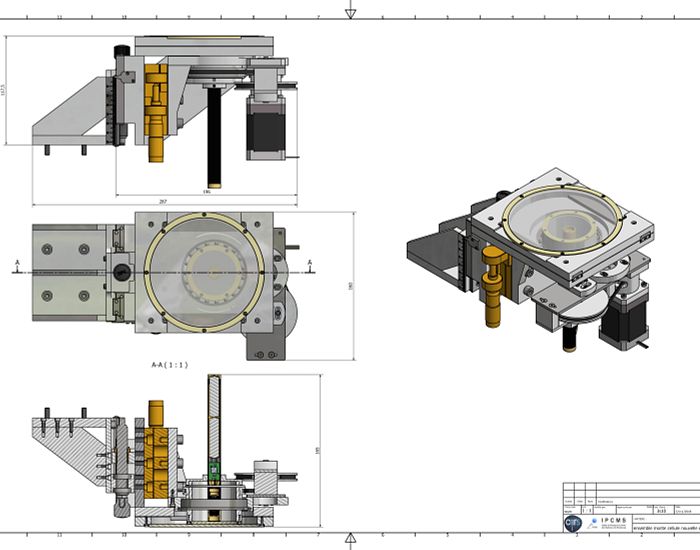
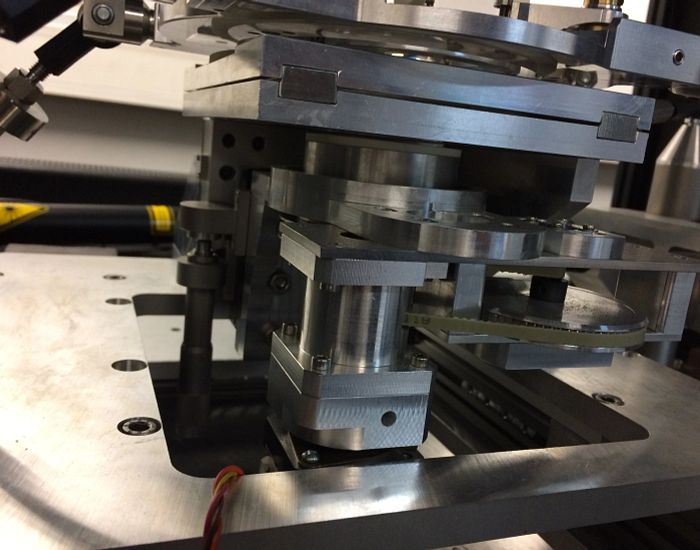
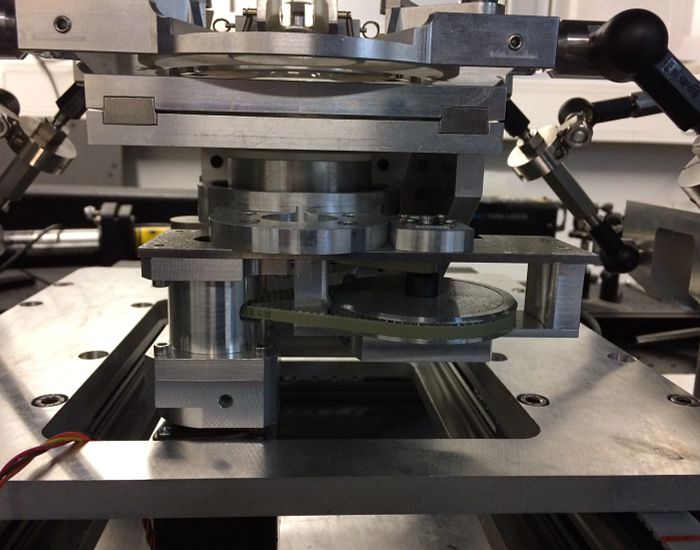
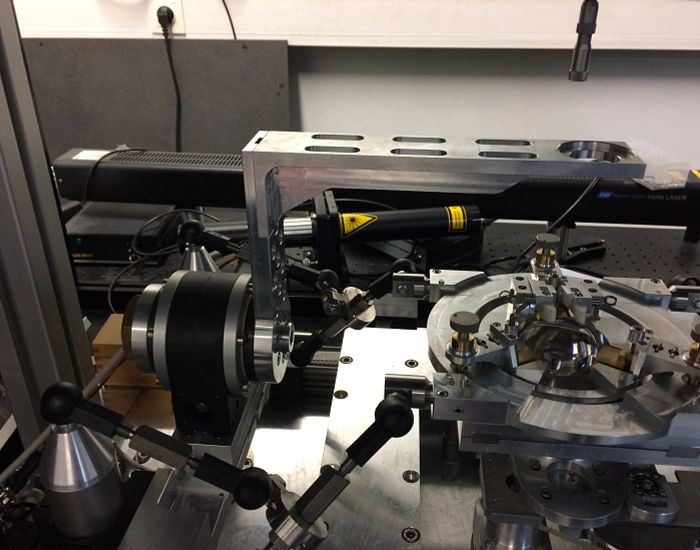
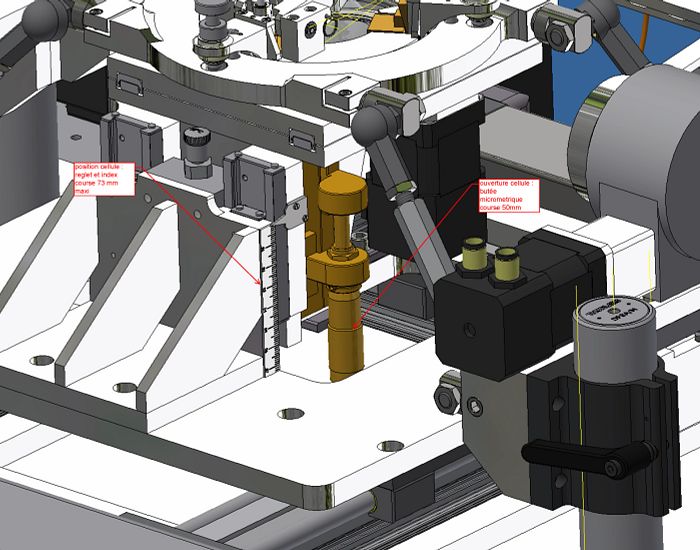
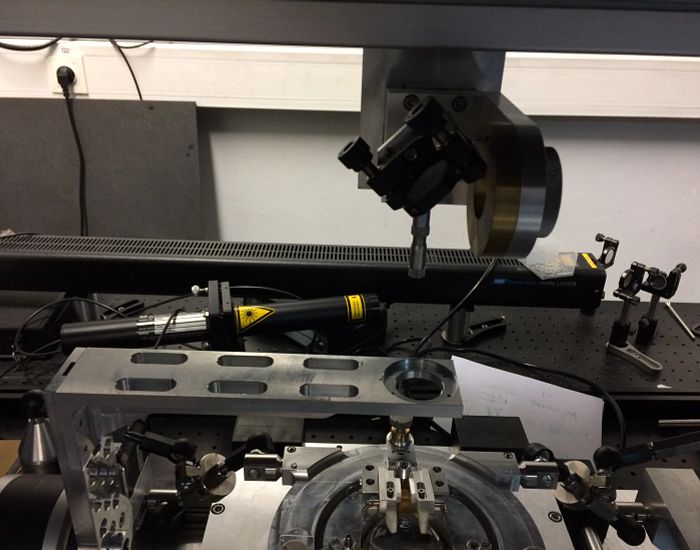
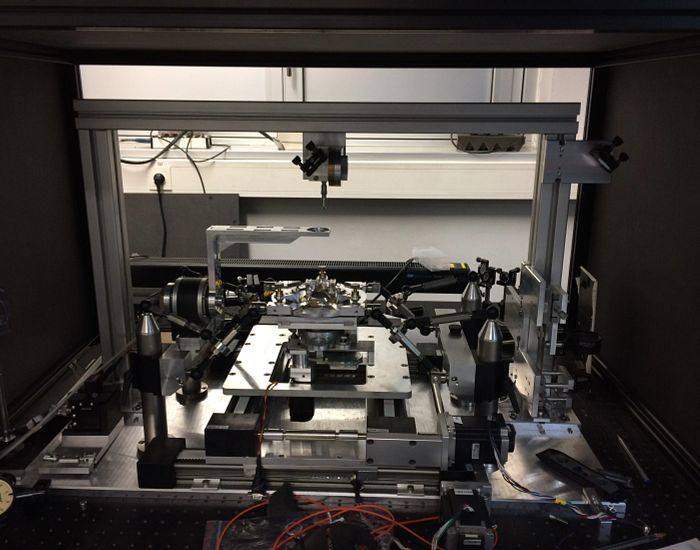
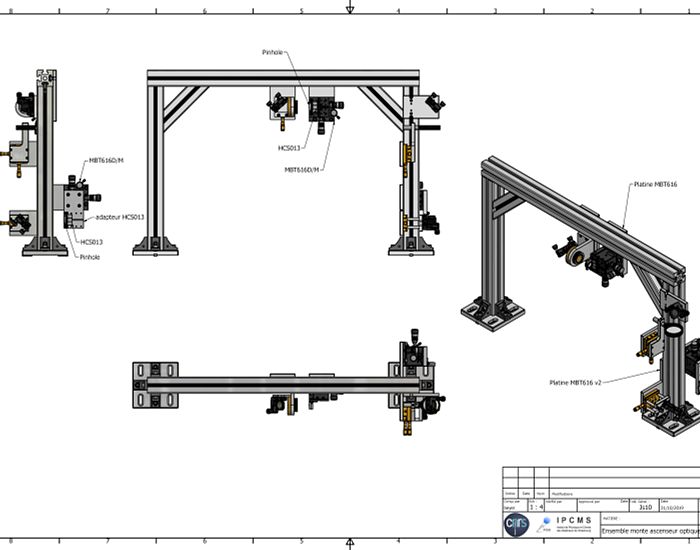
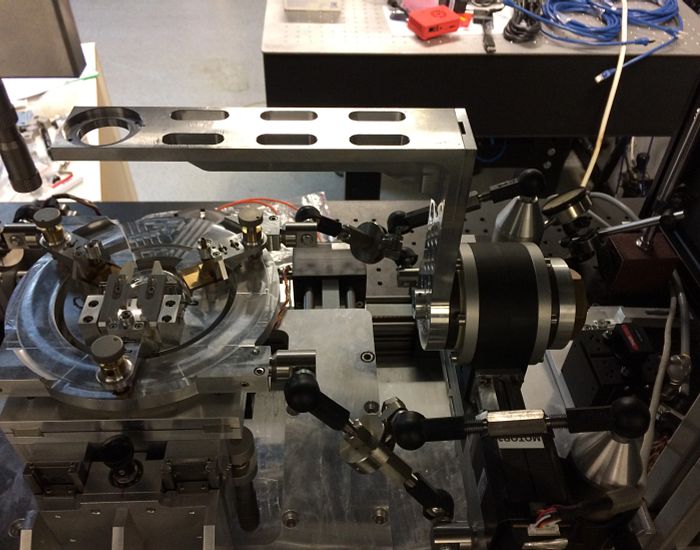
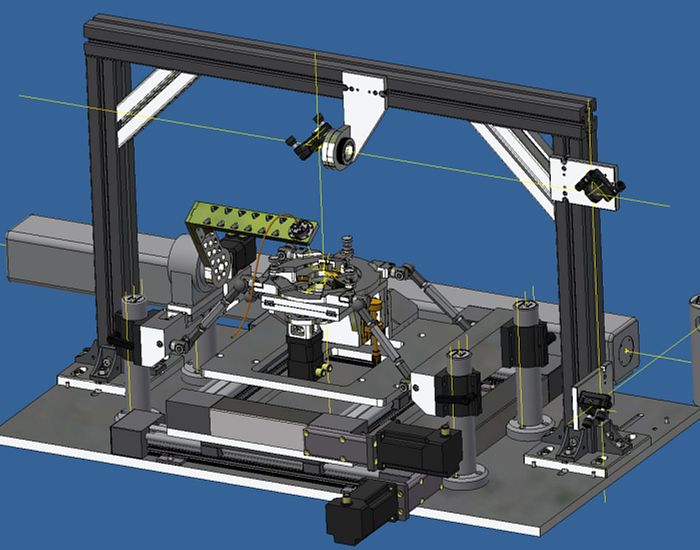
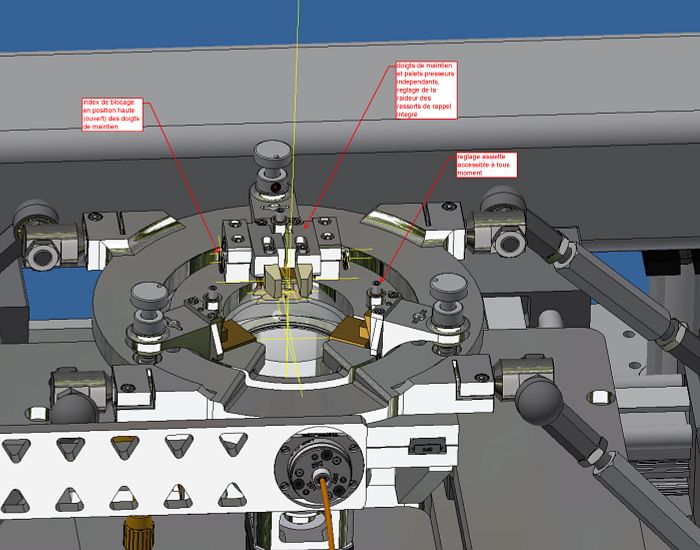
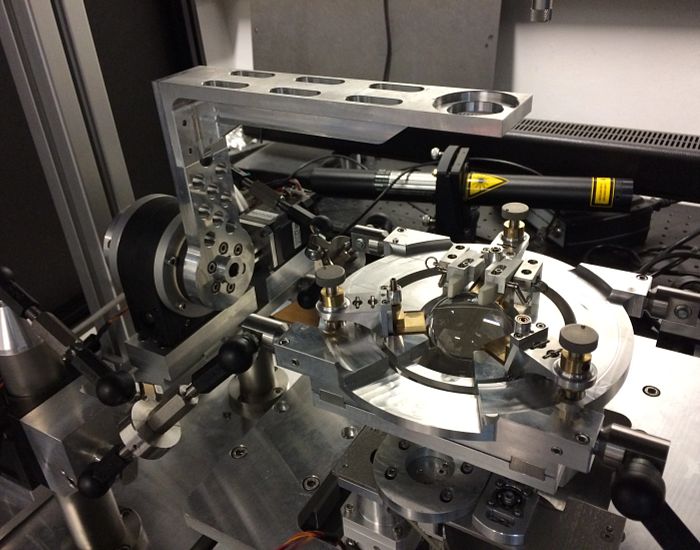
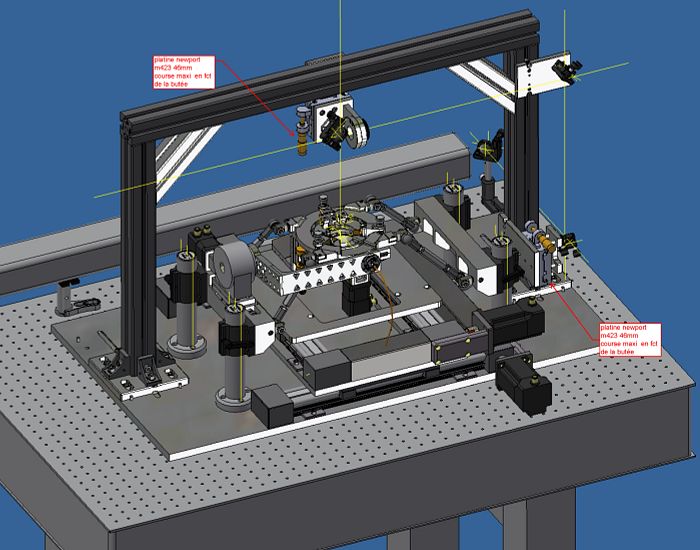
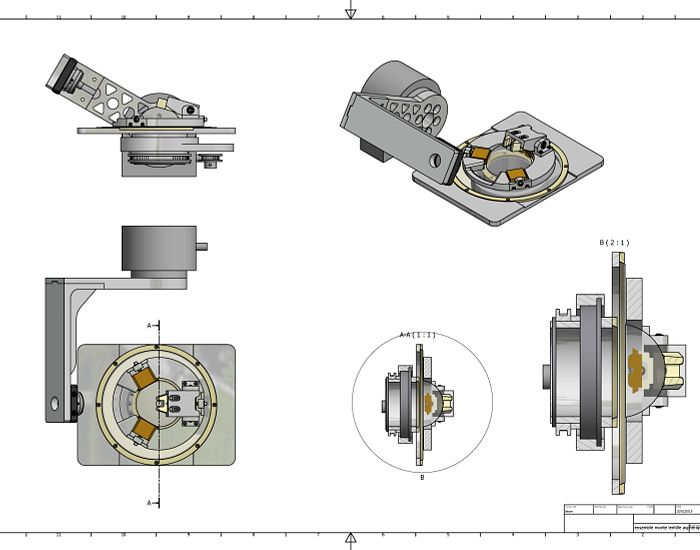
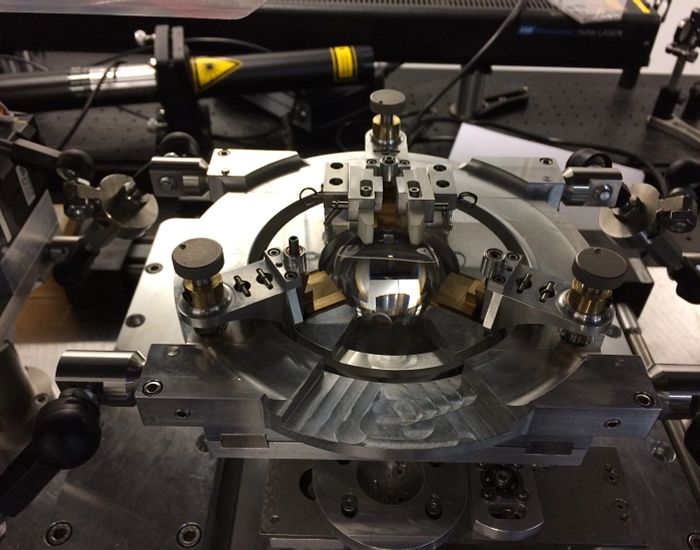
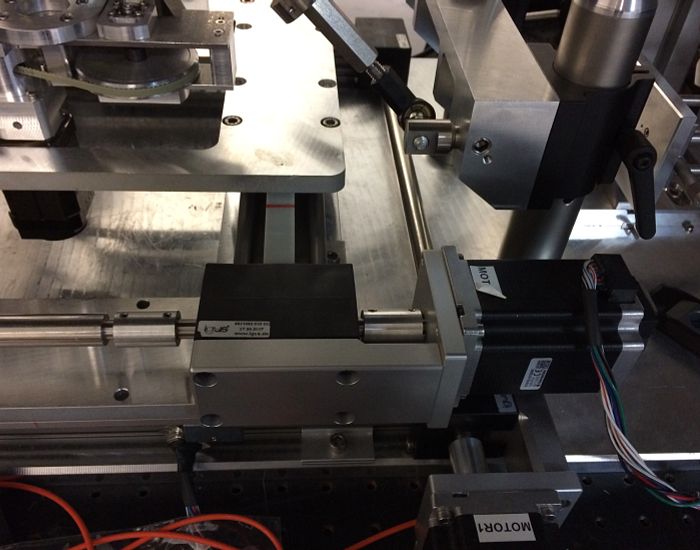
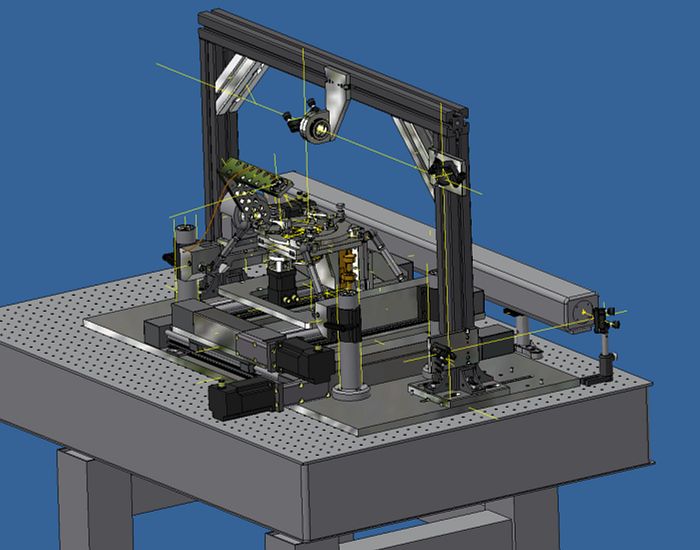
Mechanically, the hemispherical lens is held in a very precise position above the shear cell, by a mechanism adjustable in pitch, roll, yaw and to some extent xyz, supported by a set of IGUBAL WGRM (steel pivot) rods and angular joints following a configuration close to the Polonceau trusses. The shear cell is composed of two glass discs (Flint 5, n=1.6) of size in a ratio ½ . The small disk is driven in rotation (continuous or alternating) by a stepper motor and a transmission with a reduction ratio of 64, via two series of pulleys and toothed belt. The glass cell assembly opens along the z-axis, in order to introduce the liquid sample, this last one can also move along the Z-axis to position itself at a precise distance from the hemispherical lens. Finally, the whole shearing device is installed on a cross table consisting of 4 linear modules with toothed belt ZLW1040, allowing to move the cell under the fixed lens. The sample is illuminated by a red helium-neon laser with a wavelength of 633nm, the beam is brought to the zenith of the hemispherical lens via a set of lenses and mirrors mounted on a rigid aluminum gantry.
The incident light from the sample is collected by an optical fiber, mounted on a goniometer arm whose axis of rotation is collinear with the focal point of the hemispherical lens (also the central point of the sample). The length of the arm is such that the collection fiber is in the plane including the focal point of the lens and the laser beam. The goniometer arm is made of an assembly of aluminum parts and a ROBOLINK D 30 symmetrical robot joint, driven by a stepper motor. The instrument is used daily by the BioSoft research team within the Institute of Physics and Chemistry of Materials of Strasbourg (UMR7504 of the CNRS), initially it was designed and built within the framework of a doctoral thesis, thereafter it will be used as a means of characterization, accessible to other French or foreign researchers.