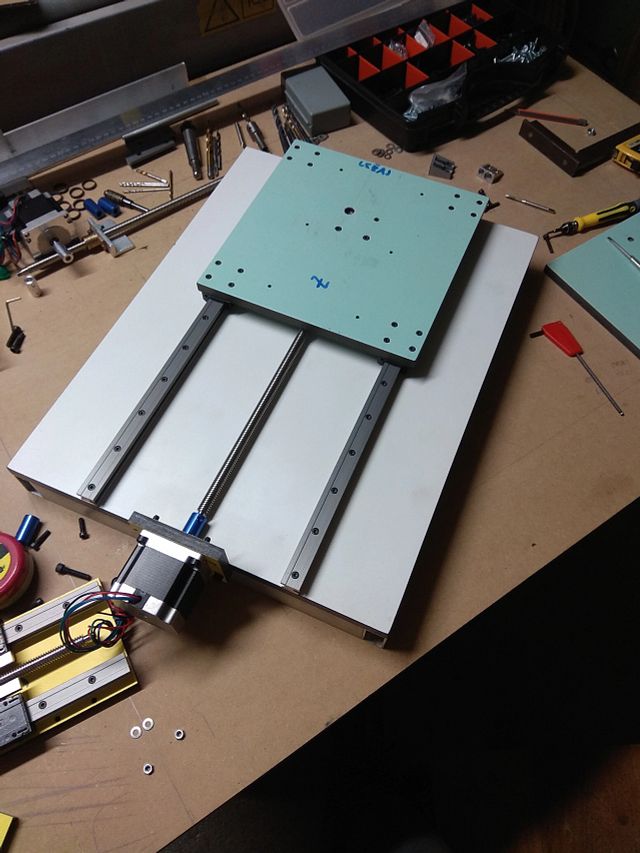
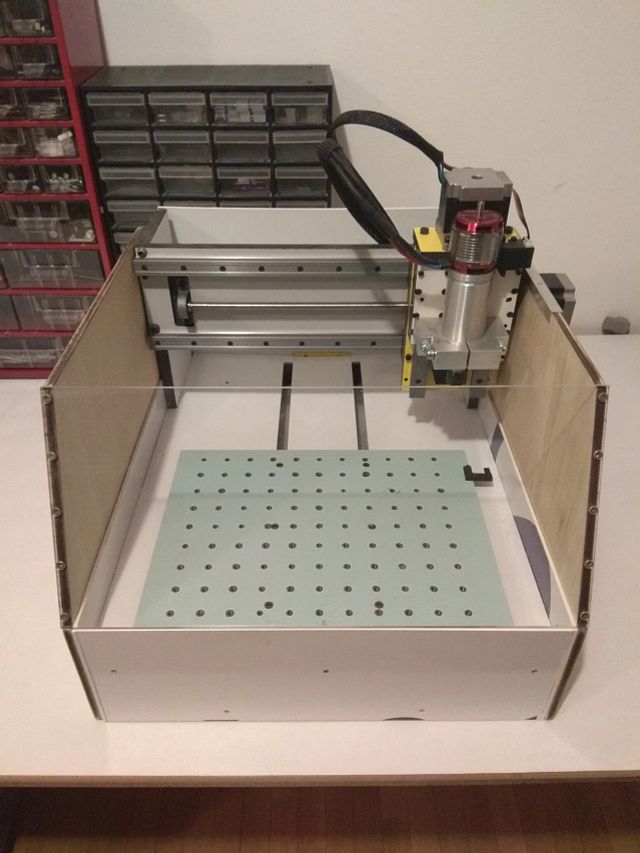
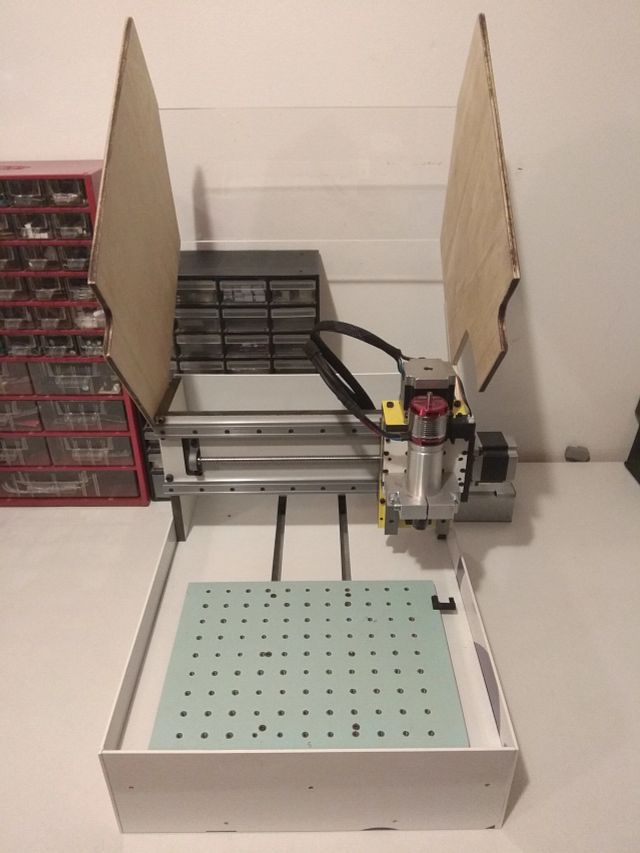
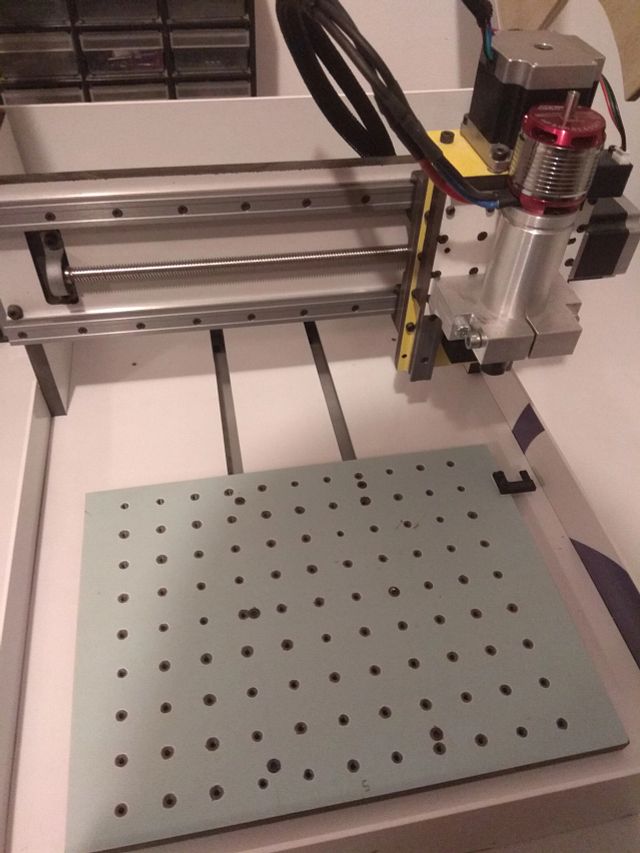
Schneller XYZ-Portalroboter als Basis für Dreidimensionales Positionieren. Auf der X-Achsen Ebene. Angetrieben über zwei Linearachsen + Spindel, wodurch hohe Genauigkeiten beim Positionieren realisiert werden können. Ebenso die Y- & Z-Achse laufen auf demselben Prinzip. X, Y & Z-Schlitten laufen auf drylin-Lagern.