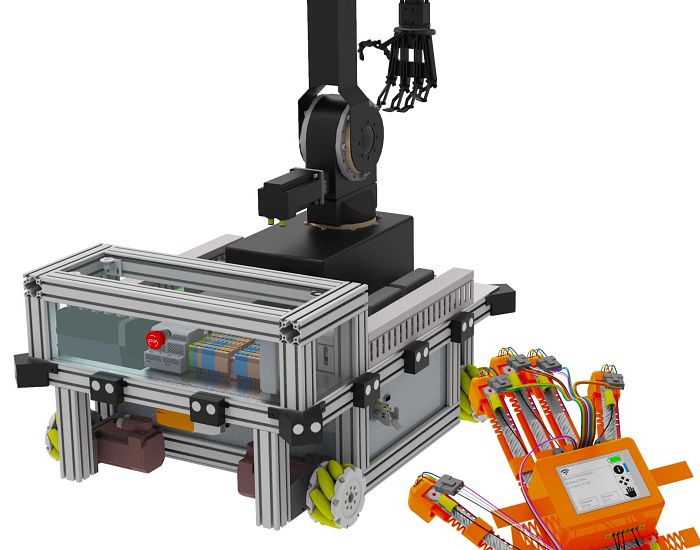
Ziel des Projektes im Rahmen unserer Diplomarbeit ist, ein mobiles Robotersystem mit Greifer zu entwickeln, um Handling-Aufgaben aus der Entfernung zu ermöglichen. Dazu wird ein mit Sensorik ausgestatteter Handschuh entwickelt, der eine intuitive Steuerung durch Gesten ermöglicht.
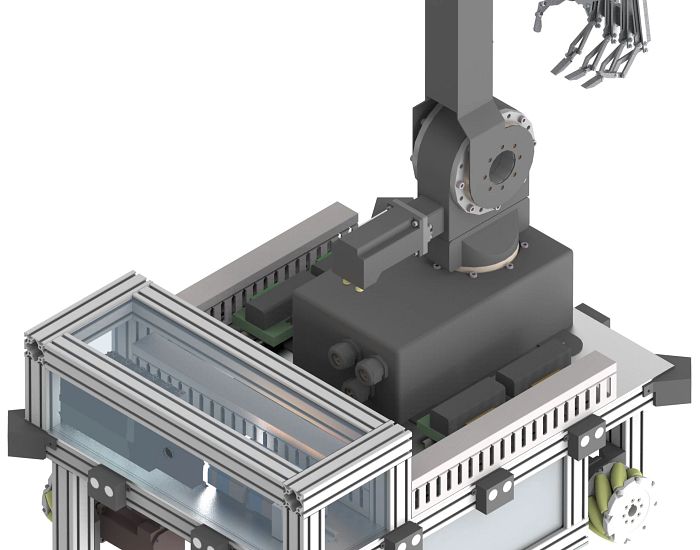
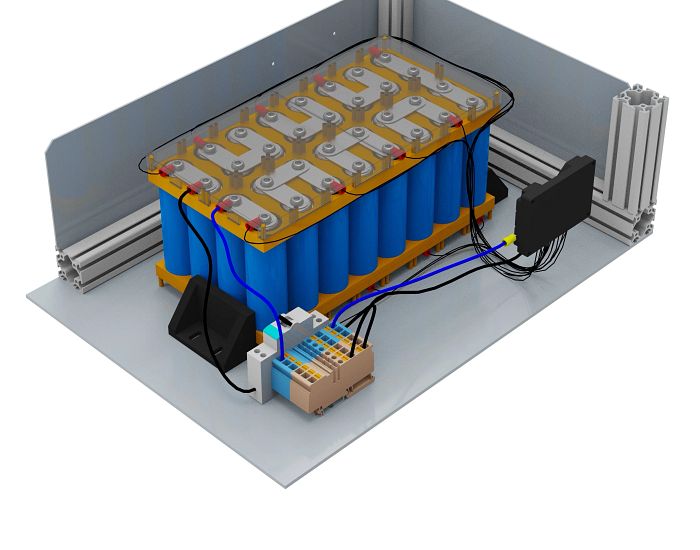
Für das Robotersystem wird ein Antriebssystem sowie ein Akkusystem entwickelt, außerdem muss ein mechanisches Gerüst hergestellt werden, in dem alle Komponenten untergebracht werden. Für die Steuerung des Systems wird eine speicherprogrammierbare Steuerung verwendet, als Roboter kommt der mit der Artikelnummer „RL-D-RBT-5532S-BC-AE“ zum Einsatz.
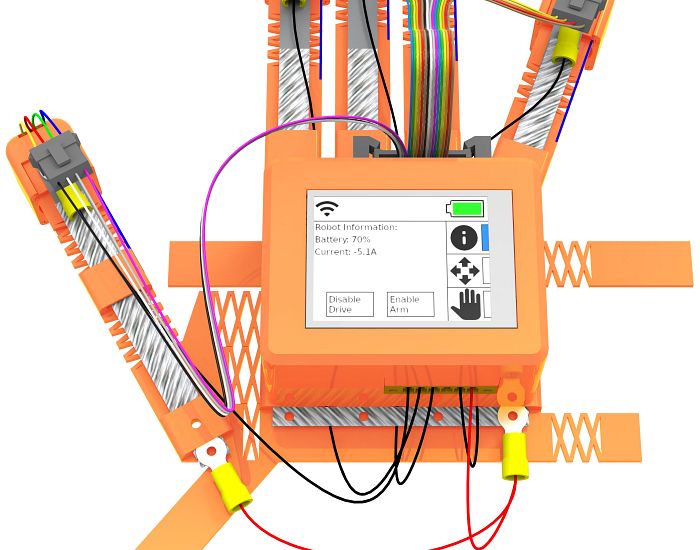
Der Handschuh wird aus flexiblem Kunststoff mithilfe eines 3D-Druck-Verfahrens hergestellt. Der Handschuh soll ebenfalls akkubetrieben sein und alle nötigen elektronischen Komponenten beherbergen, um die größtmögliche Mobilität zu erreichen.
Problem:
Es gibt eine große Anzahl an Personen, die in der Ausübung ihres Berufes manuelle Tätigkeiten durchführen müssen, bei denen sie nicht vor Ort sein können, ohne ihre Gesundheit zu gefährden. Das schließt zum Beispiel Ärzte in Zeiten von Epidemien oder Pandemien ein, aber auch Forstarbeiter, Bombenentschärfungspersonal und andere Personen, die gefährliche Stoffe handhaben. In diesen Fällen ist ein möglichst mobiles System wichtig.
Daher haben wir uns zum Ziel gesetzt, ein System zu entwickeln, das Teleoperation ermöglicht. Wenngleich auch im Rahmen der Diplomarbeit die Entwicklung eines in der Realität einsetzbaren Systems – aus zeitlichen sowie budgetären Gründen – unrealistisch ist, soll zumindest ein Prototyp veranschaulichen, wie ein derartiges System verwirklicht werden kann.
Lösungidee:
Diese Frage kann für unser Projekt bedauerlicherweise nur schlecht beantwortet werden, da es keinen vorangegangen Prozess gibt der automatisiert wurde. Unser Projekt beschäftigt sich mit Teleoperation, wo per Definition keine automatisierten Abläufe ausgeführt werden sondern die Befehle direkt vom User kommen.