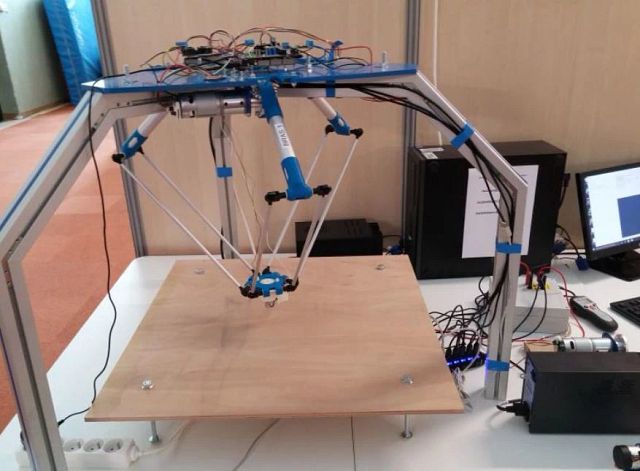
Bei der Anwendung handelt es sich um einen Roboter mit einer Delta-Parallelstruktur.
Der Roboter, der für Ausbildungszwecke eingesetzt wird, aber reale industrielle Lösungen beinhaltet, ermöglicht die Durchführung von Pick and Place-Operationen oder, nach schneller Änderung der Konfiguration, den Einsatz als Operationsroboter mit Kameraführung und Joystick-Manipulation.
IGUS-Lager und -Gelenke wurden an ALLEN Gelenken verwendet (12 Gabel- und Kugelgelenke, 12 Gleitlager).
Problem:
Für jedes der Gleitlager sind die Belastungen repetitiv, sie haben variable Richtungen und eine durchschnittliche Intensität. Die größte Einschränkung für einen Pick&Place-Roboter ist die Massenreduzierung und Trägheit mit auferlegter Steifigkeit, auf die der Einsatz von vollpolymeren Gleitlagern perfekt reagiert.
Problemlösung:
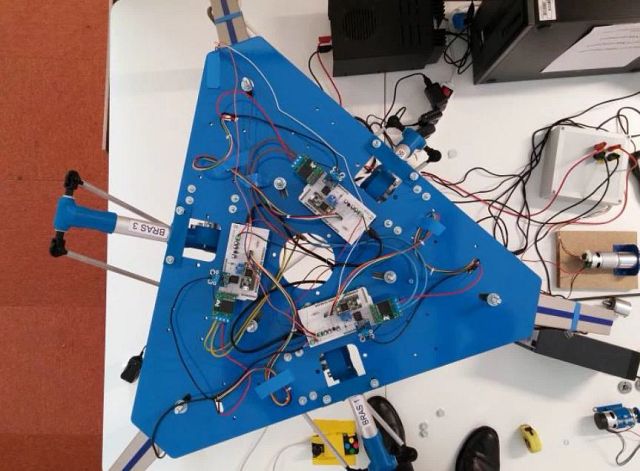
Die Leichtigkeit und Kompaktheit der IGUS-Produkte ermöglichte es, für jedes der 12 Gelenke ein sehr teures, maßgefertigtes Kugelgelenk durch 4 sehr billige Komponenten zu ersetzen und so den Bewegungsumfang zu verbessern.
Im Einzelnen: Die Innovation betrifft den Ersatz der sphärischen Verbindungen durch den direkten Kontakt, der systematisch bei den sehr teuren konventionellen Delta-Robotern verwendet wird (kundenspezifische Bearbeitung, um einen größeren Bewegungsbereich zu erhalten, Aufrechterhaltung des sphärischen Kontakts durch Federn, …), durch die serielle Verbindung eines Gelenkkopfes + Gabelkopf und eines Drehgelenks auf zwei Gleitlagern (wodurch der höchsten Rotation im Betrieb ein unbegrenzter Bewegungsbereich hinzugefügt wird).