The project was to automate the detection of GMO of corn samples, arriving from trucks, at our client’s export terminal’s lab (quality control).
Therefore, the machine was built for high throughput GMO detection, in a laboratory environment. The samples from the truck are brought to the lab and tested. The truck is then accepted or rejected, due to the presence of GMO.
The GMO detection procedure is the following:
– Randomly extract 300g of corn out of a 2.5kg sample from the truck;
– Grind the 300g of corn into flour;
– Mix the flour with a controlled quantity of water;
– Extract the supernatant (water with protein in suspension)
– Take a Lateral Flow Assay and dip it in the supernatant;
– Wait for 5min;
– Read the results from the assay (apparition of control and positive bands).
The initial problem was to automate entirely this process.
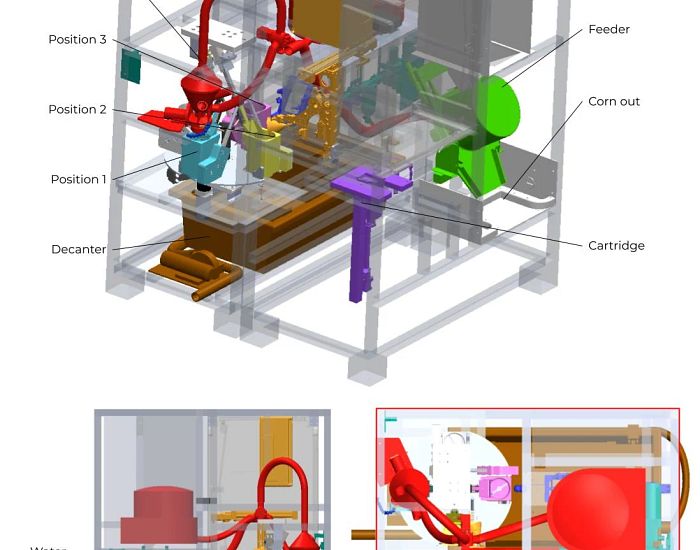
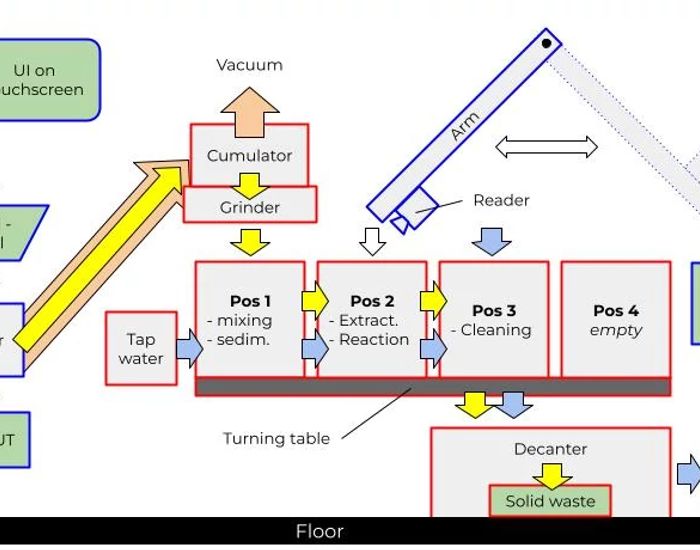
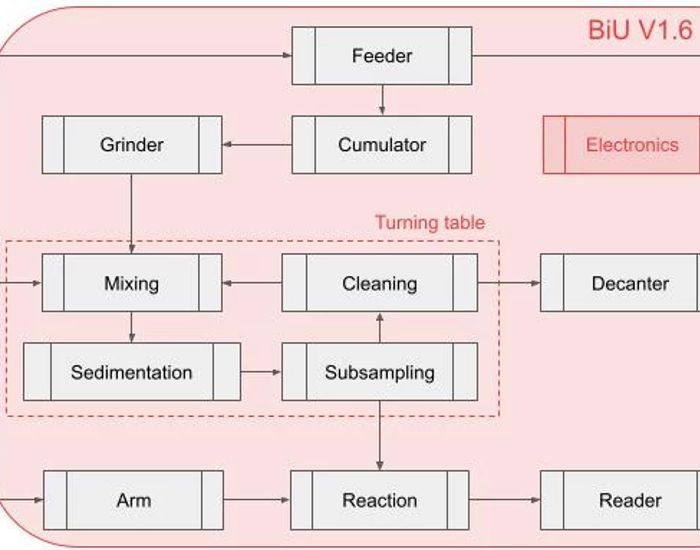
The first one allows the user to put the 2.5kg of corn in the machine. The corn arrives in the randomizer.
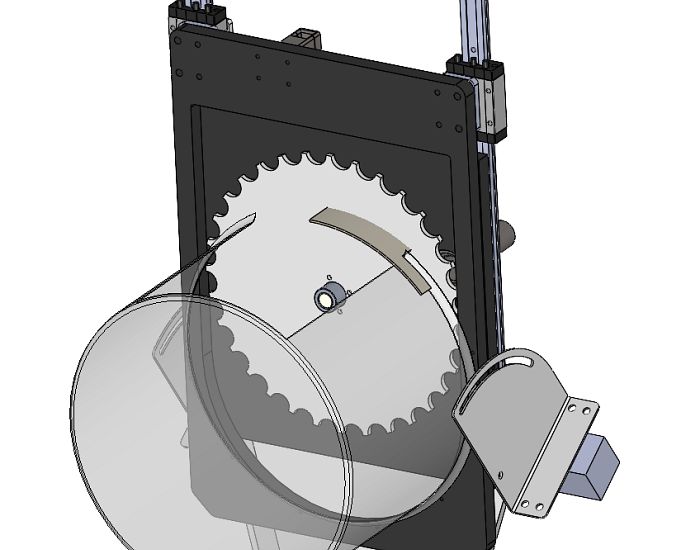
The randomizer extracts 300g of corn and put them in the grinder. The randomizer is basically a rotating wheel actuated by a stepper motor NEMA23 from Igus, and controlled with a D1 controller. The wheel rotates and sends the grains bit by bit, to the grinder. Then telescopic actuator, QLA-type, from Igus, opens a hatch and releases back the unused corn.
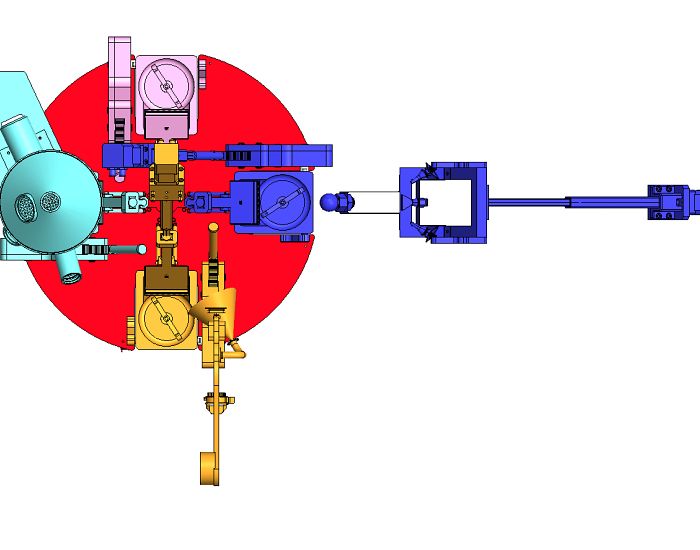
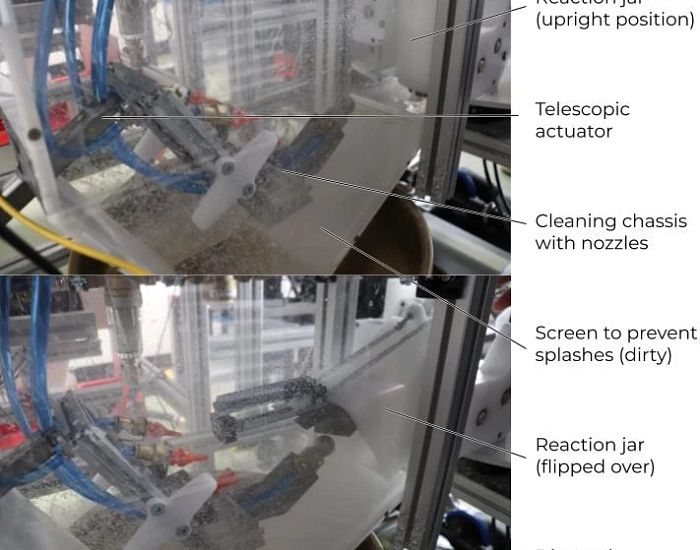
Next, the machine grinds the corn into a jar, in which a controlled water quantity is poured, and mixed. The jar is mounted on a turntable, actuated using an Igus brushless DC motor and driver. The turn table rotates by 90°, and a sieve, mounted on the jar, is actuated using a QLA actuator in order to extract the supernatant.
A robotic arm, made of 2 of two linear actuators DLE from Igus (X and Z axis) and a moto-reductor RL-D-20 (Z-rotation), picks up a lateral-flow-assay from a cartridge using vacuum. It moves using its 3 degrees of freedom and dips the lateral-flow-assay in the supernatant for five minute. The camera integrated on the arm allows to read results and in situ by image analysis, when the results appear.
Finally, the jar is cleaned after another rotation of the turning table, using a water hose.
Therefore, we optimized the throughput (up to 200/24h) compared to manual testing (90-100/24h).
We also improve the reliability of the testing by removing the human error of the equation.