Im März 2011 richteten das Tōhoku-Erdbeben und der nachfolgende Tsunami schwere Schäden bei den Kernkraftwerken im japanischen Fukushima an. Bei drei Kernreaktoren fiel die Kühlung aus und es kam zu einer katastrophalen Kernschmelze. Im Rahmen der Sanierungs- und Stilllegungsarbeiten mussten Tausende von Wissenschaftlern aus aller Welt neue oder bessere Techniken erfinden, entwickeln und bereitstellen. Zum geplanten Stilllegungsverfahren gehört auch die Beseitigung der geschmolzenen Kernbrennstoffe. Derzeit weiß man allerdings nur sehr wenig über den Standort und die Struktur des Brennstoffschutts. Durch die hohen Strahlungswerte innerhalb der Reaktorbauten sind optische Kamerasysteme nicht einsetzbar. Eine vielversprechende Methode zur Visualisierung und Charakterisierung des Brennstoffschutts ist der Einsatz von Sonarsystemen in den Reaktorbauten zur akustischen Bildgebung. Sonarsysteme sind sehr strahlungstolerant und bieten die Möglichkeit, nicht nur die Form des Brennstoffschutts abzubilden, sondern auch in sein Inneres zu schauen. Ein Stilllegungsprogramm kann erst vorangetrieben werden, wenn die Natur des Brennstoffschutts vollständig bekannt ist.
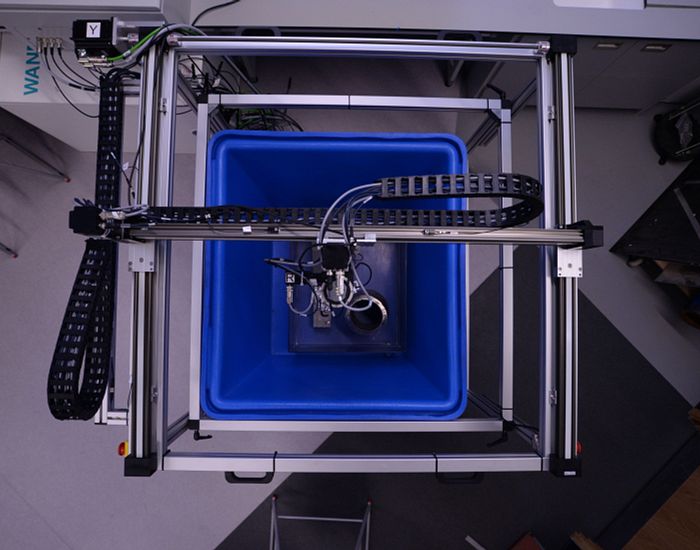
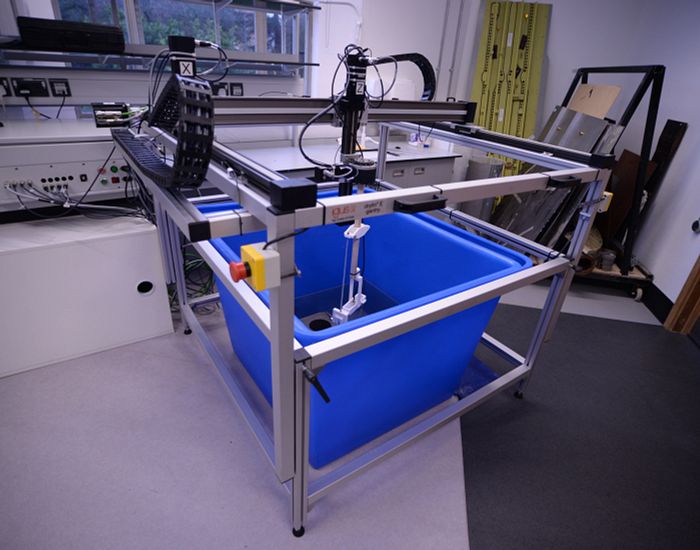
Deshalb wurde ein großes Scansystem benötigt, mit dem wir Sonarsonden positionieren und simulierten Uran-Brennstoffschutt, Reaktorkernkomponenten und kerntechnische Rohrleitungen darstellen konnten (in einem der Bilder im Anhang detailliert dargestellt). Mit diesem Scansystem, bei dem die drylin-Lager eingesetzt werden, können wir in einer sicheren und anpassbaren Umgebung neue Bildgebungsmethoden für Kernbrennstoffe entwickeln.
Problem:
Während der verschiedenen Auftragsphasen für das Portalsystem haben wir (gemeinsam mit Adam Sanjurgo bei igus UK) eine Reihe kritischer Leistungsaspekte identifiziert, die erfüllt werden müssen. Dazu gehörten (1) ein Baukastensystem, das bei Änderungen der Bedingungen in Fukushima angepasst werden konnte. Es war wichtig, dass wir zusätzliche Motoren und Führungen aufnehmen konnten. (2) Das System musste angesichts der sensiblen Arbeiten, die im Laborbereich des Scansystems durchgeführt werden, im Betrieb geräuscharm sein. (3) Das ganze System musste sauber sein, um unsere hochempfindlichen (und teuren!) Anlagen nicht zu kontaminieren. (4) Die Wartung musste so einfach wie möglich sein, ohne dabei Kompromisse bei der Leistung zu machen. (5) Das System musste unsere Messinstrumente millimetergenau positionieren, denn bei Ultraschallmessungen kommt es auf genaue Entfernungsmessung an. (6) Das ganze System musste erschwinglich sein und guten Herstellersupport bieten, denn Scansysteme gehören nicht zu unseren Kernkompetenzen. (7) Das Portalsystem musste auf engem Raum untergebracht werden und das Kabelmanagement musste einfach gehalten werden. Auch die einfache Anpassung des Kabelmanagements war sehr wichtig, da regelmäßig Sensoren hinzugefügt und entfernt werden. (8) Die Steuerung musste von uns entwickelt und implementiert werden. Wir haben einige sehr spezifische Anforderungen an die Bewegungssteuerung und wollten sie deshalb selbst entwickeln.
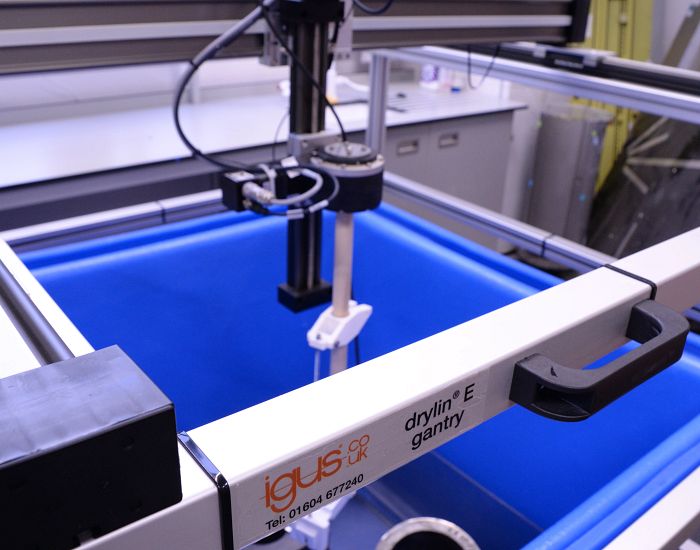
Nach der Festlegung der Spezifikationen für das Portal haben wir gemeinsam mit Adam Sanjurgo den Entwurf für das Gesamtsystem erstellt. Die von igus gelieferte Lösung umfasste den besonders robusten Portalrahmen, das Kabelmanagementsystem für die e-kette sowie drylin-Lager, Schrittmotoren, Initiatoren und die gesamte benötigte Verkabelung.
Nachdem das ganze System seit etwa drei Monaten in Betrieb ist, konnten wir feststellen, dass jede unsere Anforderungen erfüllt oder übertroffen wurde. Wir sind mit der Leistung des Systems sehr zufrieden, und es hat bereits sehr nützliche Daten geliefert. Außerdem war es sehr einfach, mit dem Gesamtsystem zu arbeiten und es zu modifizieren. Für uns als Anfänger in Sachen Bewegungssteuerung war das sehr wichtig.
Lösung:
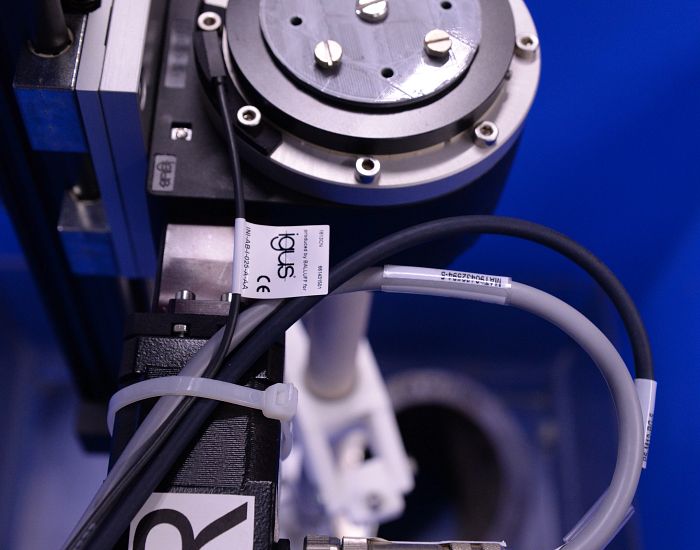
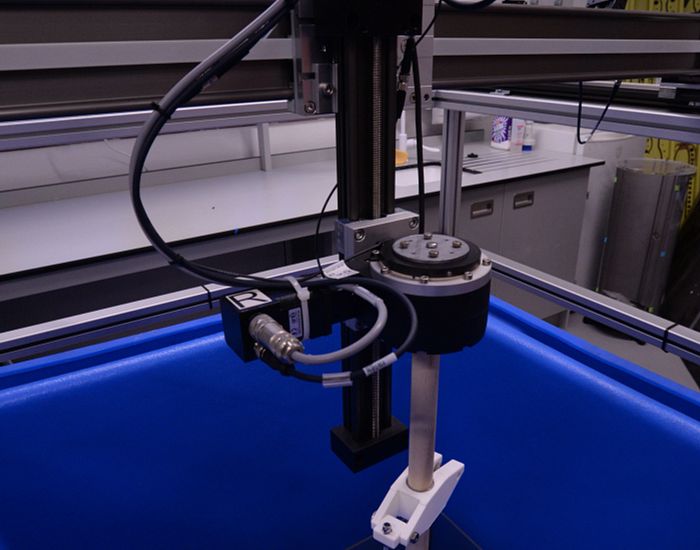
Unsere ursprüngliche Anforderung für das Scansystem war eine hohe Übersetzungsdistanz in X- und Y-Richtung. Aber bereits in einem frühen Auftragsstadium wies Adam Sanjurgo darauf hin, dass das drylin-Baukastensystem uns auch die Möglichkeit gibt, dies durch eine zusätzliche Z-Achse und einen Rotations-Freiheitsgrad deutlich auszuweiten. Durch das flexible Baukastenprinzip des Scansystems war es sehr unkompliziert, zwei weitere Bewegungsachsen hinzuzufügen (in unserem Fall eine robolink-Einheit für die Rotation und eine SAW-Linearachse für die Z-Bewegung). Dank der hohen Belastbarkeit der Lager für die X- und Y-Achsen wurde der Betrieb dadurch nicht beeinträchtigt.
Wir hatten schon Erfahrungen mit herkömmlichen Kugellager-Scansystemen gemacht und haben dabei immer Probleme mit der richtigen Schmierung. Oftmals waren die Systeme entweder zu wenig oder übermäßig geschmiert. Die Folge war entweder hohe Geräuschentwicklung im Betrieb oder übermäßige Ansammlungen von Schmutz und Schmiere. Die Geräuschentwicklung im Betrieb war ein besonders ärgerliches Problem angesichts der Tatsache, dass wir in einem Akustiklabor arbeiten. Frühere Systeme waren so laut (bei einem Akustiklabor gilt das, was für das menschliche Ohr leise ist, für die Instrumente nicht als leise), dass wir sie außerhalb der Arbeitszeiten betreiben mussten. Auch die Schmutzentwicklung früherer Systeme war ein Problem, denn viele unserer Instrumente (etwa Mikrofone und optische Systeme) sind empfindlich und können selbst durch einen Fingerabdruck schon beschädigt werden, von Schmierfett ganz zu schweigen.
Bei unserer Suche nach einem geräuscharmen System wurden wir auf die drylin-Systeme von igus aufmerksam gemacht. Wir hatten die Gelegenheit, mit einem früheren Kunden über die Vorteile der igus-Linearlager zu sprechen. Dieser Kunde empfahl uns nicht nur die drylin-Lager, sondern hob auch den Kundendienst bei igus hervor, den wir inzwischen selbst als sehr gut erlebt haben.
Nach der Entscheidung für ein großes Scansystem waren wir sehr daran interessiert, es zu testen und seine Leistungswerte zu begutachten. Unsere wichtigsten Anliegen waren die Geräuschentwicklung im Betrieb und die Stabilität bei der Bewegung. Bisher wurden unsere Anforderungen in beiden Punkten übertroffen. Das System ist tatsächlich so leise, dass es tagsüber betrieben werden kann, ohne dass andere etwas davon merken, und bisher haben wir keinerlei Störungen von Messungen innerhalb unseres Labors festgestellt.