Luftgestützte Manipulationsroboter, also Drohnen mit Roboterarmen, können entlegene oder in großer Höhe befindliche Arbeitsbereiche einfach und schnell erreichen. Deshalb sind sie für Inspektions- und Wartungsanwendungen in Bereichen wie Öl- und Gasraffinerien, Chemiefabriken, Windkraftanlagen, Solaranlagen oder Stromleitungen besonders interessant. Bei den Arbeitsvorgängen eines luftgestützten Manipulators geht es normalerweise um eine physische Interaktion mit der Umgebung, beispielsweise die Ausführung von Greifaufgaben oder die Ausübung einer Kraft bei Kontakt. In solchen Situationen muss die Interaktion der Werkzeuge über die luftgestützte Plattform richtig eingeschätzt und gesteuert werden, damit die Stabilität der Steuerung nicht in Gefahr gerät und Kollisionen und Abstürze vermieden werden. Bei der Konstruktion und Entwicklung nachgiebiger Gelenkmanipulatoren spielen auch Faktoren wie Sicherheit während der Interaktionen im Flug, Ausnutzung der Energiespeicherkapazität und Passivitätseigenschaften von Federn eine Rolle, um den luftgestützten Roboter vor Stößen und Überlastung zu schützen.
Problem:
Im Gegensatz zu den meisten industriellen Manipulatoren mit eingebauten teuren Kraft-/Drehmomentsensoren in den Gelenken oder am Endeffektor bieten die Servoaktoren, die normalerweise für leichte Roboterarme im Bereich luftgestützter Manipulation eingesetzt werden, keine direkte Messung des Drehmoments, oder diese basiert auf dem Strom und ist deshalb aufgrund der statischen Reibung des Getriebes ungenau. Deshalb wurden Methoden entwickelt, die Kräfte und Drehmomente aus der Messung der Umlenkung des elastischen Elements auf Gelenkebene oder im kartesischen Raum abzuschätzen. Die mechanische Nachgiebigkeit hat während der physischen Interaktionen des luftgestützten Roboters im Flug offensichtliche Vorteile. Der Hauptnachteil dieser Mechanismen besteht in der geringeren Genauigkeit bei der Positionierung durch die Umlenkung der Gelenke oder Glieder. Durch das Masse-Feder-Dämpfersystem kommt eine Dynamik zweiter Ordnung hinzu.
Lösung:
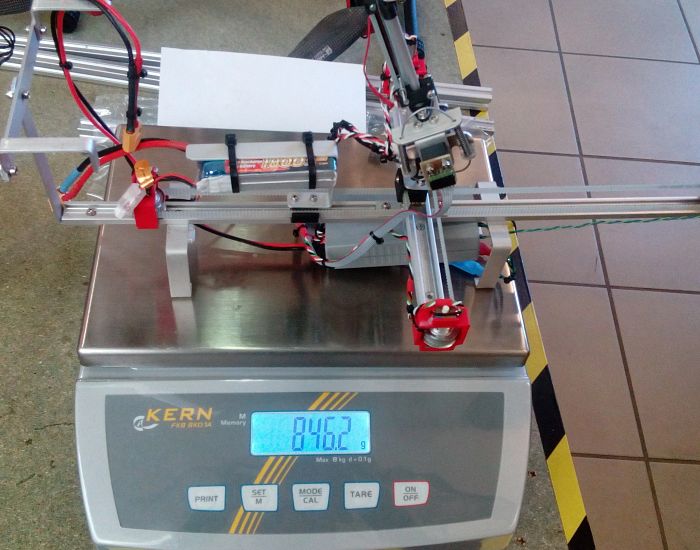
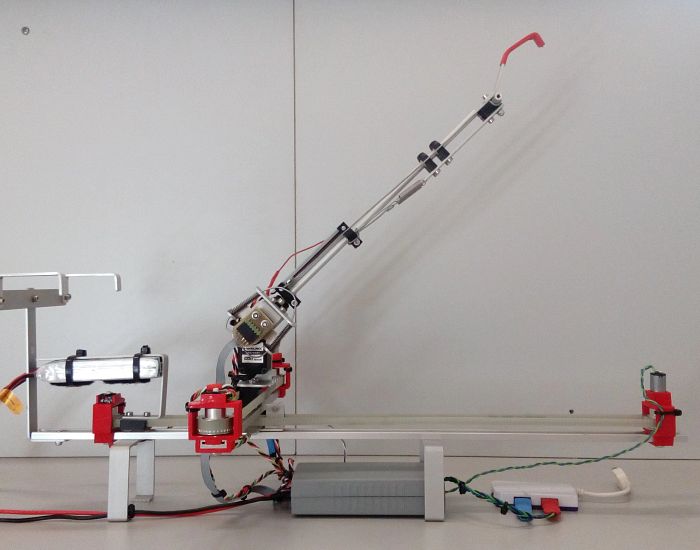
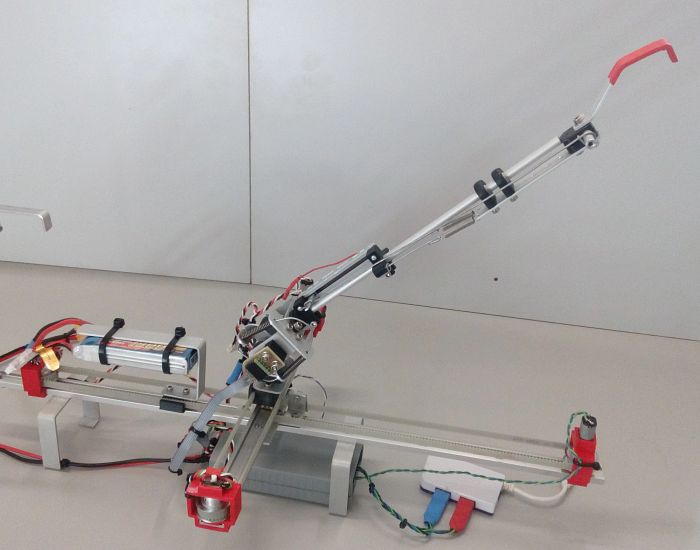
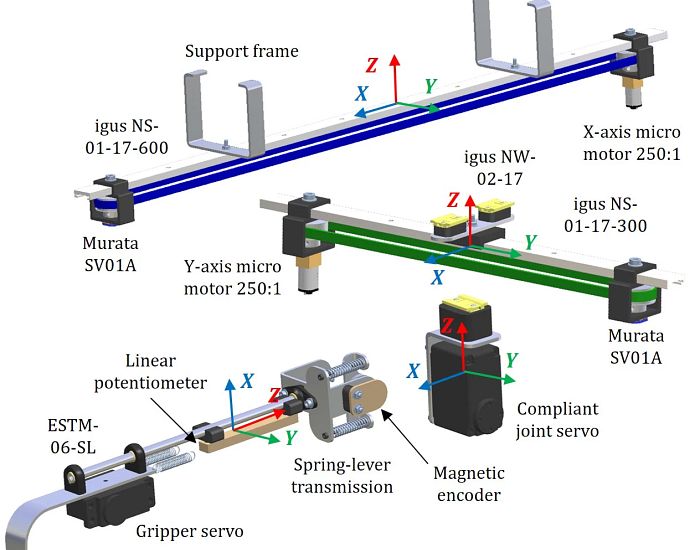
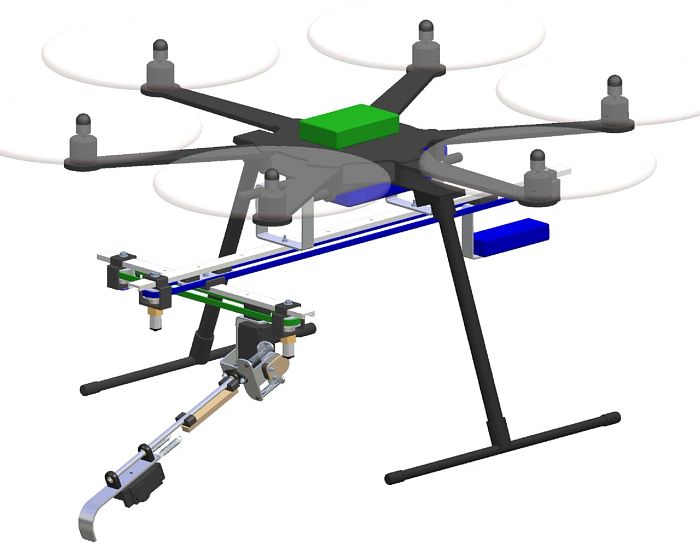
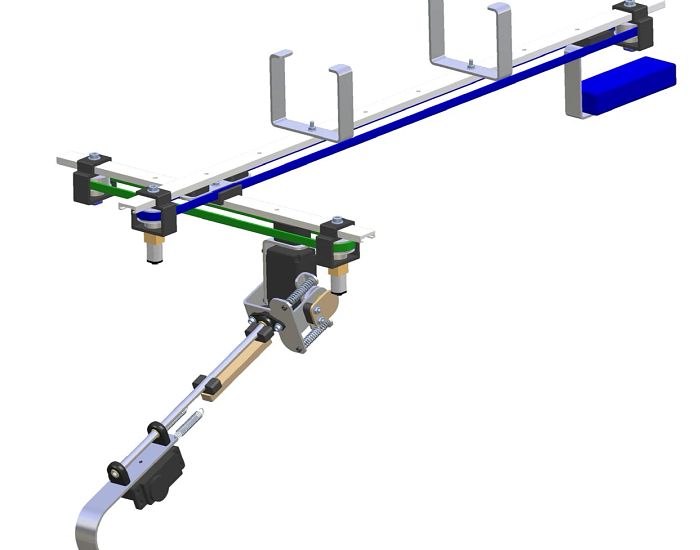
Der für diesen Wettbewerb präsentierte luftgestützte Manipulator (siehe Abbildung 1 im Anhang) besteht aus zwei Komponenten: einer DJI-F550-Plattform mit Sechsfach-Rotor und dem kartesischen Manipulator (siehe Abbildung 2), deren wichtigste Spezifikationen in Tabelle 1 zusammengefasst sind. Der kartesische 2-DOF-Manipulator besteht aus zwei Lineargleitführungen, igus® NS-01-17-600 (X-Achse) und NS-01-17-300 (Y-Achse), sowie drei Schlitten NW-02-17. An den Spitzen der beiden Linearführungen werden Zahnscheiben mit 22 mm Durchmesser angebracht, welche die Bewegung vom Pololu-Mikrometallgetriebemotor (Gewicht 10 g, Untersetzung 250:1) auf die Zahnriemen übertragen. Die Rotation wird mit zwei nebeneinanderliegenden SV-01A-Potentiometern von Murata gemessen. Dieses Gerät hat eine elektrische Spannweite von 333°, deshalb wird ein zweites Potentiometer für den toten Winkel benötigt. Mit dem Drehwinkel und der Anzahl der Drehungen kann man die Linearverschiebung von der kartesischen Basis berechnen. Diese Vorrichtung wird mit zwei U-förmigen Aluminiumrahmen im Abstand von 10 cm unten am Hexarotor angebracht. Der nachgiebige Gelenkarm wird am Schlitten der Linearführungsstruktur in der Y-Achse angebracht. Am nachgiebigen Arm wird ein Herkulex-DRS-0101-Servo eingesetzt, außerdem ein kompakter Federhebel-Übertragungsmechanismus, gestützt von einem JFM-08-06-04-Gleitlager mit Bund, ein Magnetgeber AS5048 zur Messung der Umlenkung (mit einer Genauigkeit von 0,2°), ein 250 mm langes Aluminiumglied in einem EFOM-06 und ein gleitender Greifer an der Spitze, gestützt von zwei ECLM-06-SLIM-Lagern und zwei Zugfedern. Die Linearumlenkung des Greifers, die mit der Zugkraft zusammenhängt, wird mit einem linearen Potentiometer gemessen. Masse und Trägheit der Glieder des Prototyps sind in Tabelle 2 aufgeführt. In Abbildung 2 findet man die Referenzachsen und das Massezentrum dazu.