Commonplace Robotics GmbH
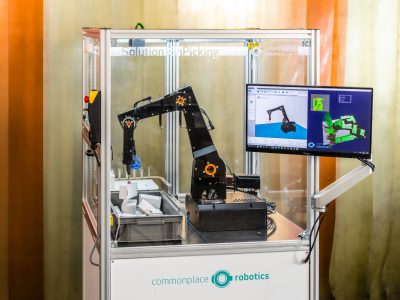
Die „Solution Griff-in-die-Kiste“ Anlage entnimmt Teile aus einer Lagerbox und gibt sie an den nächsten Verarbeitungs- oder Verpackungsprozess weiter. Sie besteht aus:
• Roboterarm igus robolink mit Steuerung zum Handhaben der Bauteile. Es können auch Portale oder Delta-Roboter verwendet werden.
• Sensor zur Erstellung eines 3-D Bildes der Teile in der Lagerbox
• Auswertesoftware um aus dem 3D-Bild eine Greifposition zu erzeugen
• Sicherheits-SPS mit Tür- und Positionsschaltern
• Roboterzelle aus Aluminiumprofilen
Vom Bediener wird eine Kiste voller Teile eingelegt, etwa Spritzgussteile oder Medikamentenschachteln. Er startet den Prozess, der Roboter räumt nun vollautomatisch die Kiste leer. Der Ablauf erfolgt in 4 Schritten:
1. Der Sensor erzeugt ein 3-D Bild von den in der Kiste liegenden Teilen, eine sogenannte Punktewolke. Darin ist die Oberfläche der Teile sichtbar.
2. Die Auswertesoftware erkennt in der Punktewolke die Teile. Dies kann auf der Basis von ebenen Flächen oder auf der Basis von CAD-Daten erfolgen.
3. Es wird automatisch ein gut zu greifendes Teil ausgewählt, meist das zu oberst Liegende. Für dieses Teil wird der beste Greifpunkt berechnet und zur Robotersteuerung geschickt.
4. Der Roboter greift das Teil und legt es an einer Übergabeposition ab. Sobald der Roboterarm den Platz über der Kiste verlassen startet der nächste Durchlauf.
Die zu greifenden Teile können entweder als Quader mit definierten Kantenlängen, oder als CAD-Datei eingelernt werden. Das Greifen der Teile erfolgt mit einem Vakuumsauger oder einem normalen Greifer.