Italia
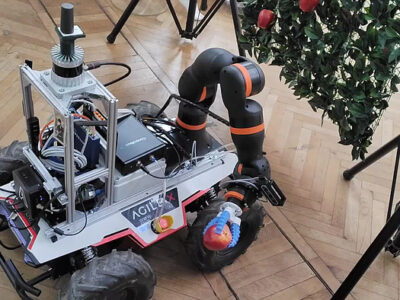
This research project investigates the application of autonomous fruit picking within a controlled, simulated espalier apple orchard environment. The orchard features apple trees trained to grow flat against vertical trellises, mimicking the structured layout commonly found in commercial orchards. This standardized environment allows for precise testing and refinement of the robotic fruit-picking system. The mobile robotic platform, equipped with the Igus Rebel 6-DoF robotic arm and advanced sensing capabilities, navigates the orchard rows, accurately identifying and harvesting ripe apples. The system employs a stereo depth camera for perception and a soft pneumatic gripper actuator for grasping the fruits on the tree.

Cartesian 4-axis robotic automation to enslave two calenders for different machining operations. Calendered parts form orthopedic components.
Manus 2017
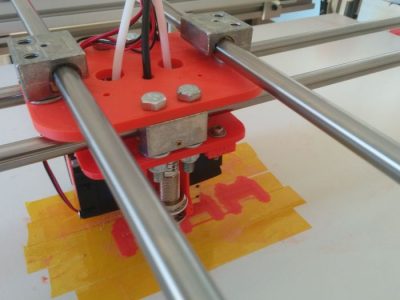
We have developed a core xy for our 3d printers and we need bearings that need no lubrification and offers high performance