Koppl
Ziel des Projektes im Rahmen unserer Diplomarbeit ist, ein mobiles Robotersystem mit Greifer zu entwickeln, um Handling-Aufgaben aus der Entfernung zu ermöglichen. Dazu wird ein mit Sensorik ausgestatteter Handschuh entwickelt, der eine intuitive Steuerung durch Gesten ermöglicht.
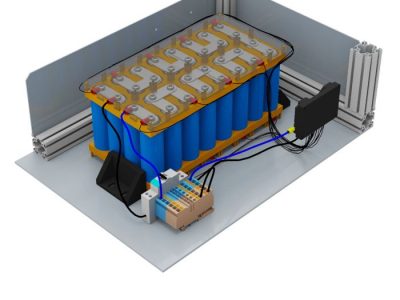
Für das Robotersystem wird ein Antriebssystem sowie ein Akkusystem entwickelt, außerdem muss ein mechanisches Gerüst hergestellt werden, in dem alle Komponenten untergebracht werden. Für die Steuerung des Systems wird eine speicherprogrammierbare Steuerung verwendet, als Roboter kommt der mit der Artikelnummer "RL-D-RBT-5532S-BC-AE" zum Einsatz.
Der Handschuh wird aus flexiblem Kunststoff mithilfe eines 3D-Druck-Verfahrens hergestellt. Der Handschuh soll ebenfalls akkubetrieben sein und alle nötigen elektronischen Komponenten beherbergen, um die größtmögliche Mobilität zu erreichen.