Award ID: 680 Company: HTBLuVA Salzburg
Allgemeine Informationen
- Datum: 2020-04-23 19:45:13
- Firma: HTBLuVA Salzburg
- Ansprechpartner: Herr Moritz Taferner
- E-Mail: moritztaf@gmail.com
- Anschrift: Lämmererweg 19, Koppl
- Telefon/Fax: 436804042852 /
- Land: Austria
Beschreibung:
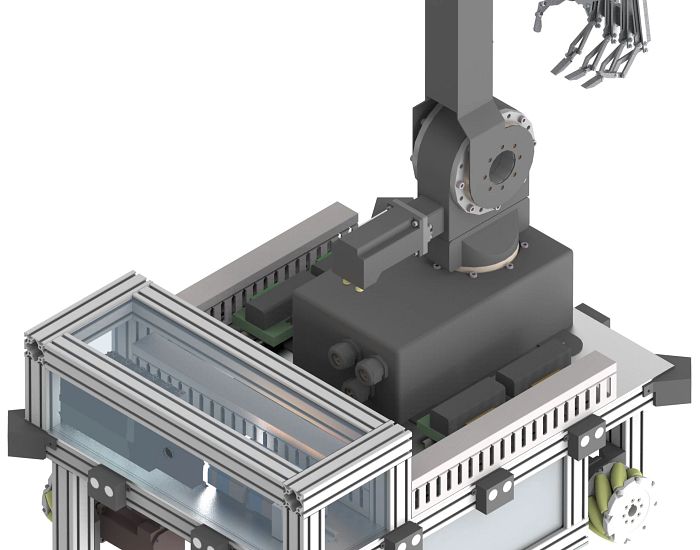
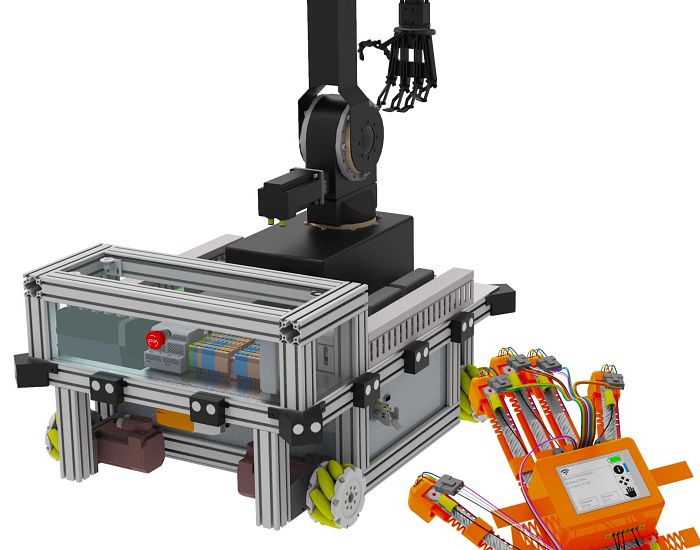
Für das Robotersystem wird ein Antriebssystem sowie ein Akkusystem entwickelt, außerdem muss ein mechanisches Gerüst hergestellt werden, in dem alle Komponenten untergebracht werden. Für die Steuerung des Systems wird eine speicherprogrammierbare Steuerung verwendet, als Roboter kommt der mit der Artikelnummer "RL-D-RBT-5532S-BC-AE" zum Einsatz.
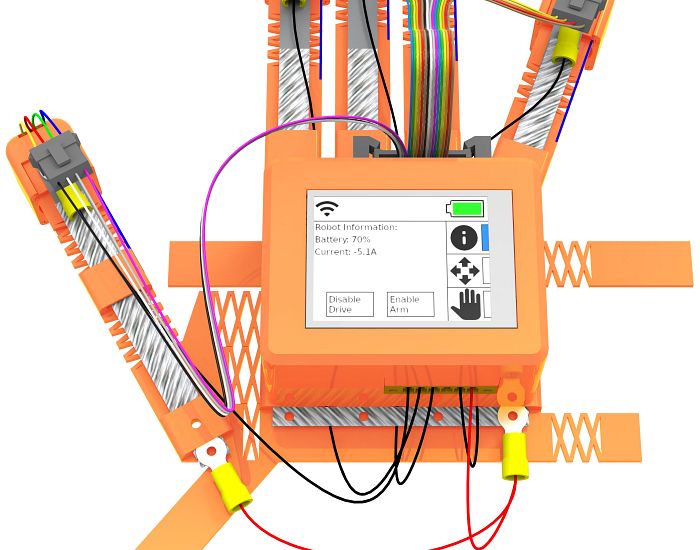
Der Handschuh wird aus flexiblem Kunststoff mithilfe eines 3D-Druck-Verfahrens hergestellt. Der Handschuh soll ebenfalls akkubetrieben sein und alle nötigen elektronischen Komponenten beherbergen, um die größtmögliche Mobilität zu erreichen.
Problem:
Daher haben wir uns zum Ziel gesetzt, ein System zu entwickeln, das Teleoperation ermöglicht. Wenngleich auch im Rahmen der Diplomarbeit die Entwicklung eines in der Realität einsetzbaren Systems – aus zeitlichen sowie budgetären Gründen – unrealistisch ist, soll zumindest ein Prototyp veranschaulichen, wie ein derartiges System verwirklicht werden kann.
Lösungidee:
Dokumente

Dokumente