Austria

Präzisionsschneidmesser werden mit dem Roboter und Schunk Greifer abgeholt und in 175° heißes Schutzwachs getaucht und anschließend sauber und gleichmäßig abgelegt.

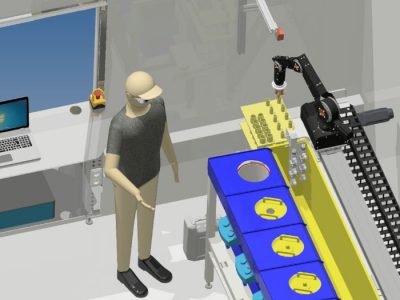
Modulare Dosieranlage für exaktes und wiederholgenaues Dosieren von Kleb- und Dichtstoffen in der Prototypen- und Serienfertigung.
Einfaches Tauschen von Dosierventilen, Werkzeugen oder Vorrichtungen wird mittels Nullpunkt-Spannsystemen und Vermessungs-Systemen realisiert.
Dadurch wird eine effiziente Nutzung auch bei hoher Produktvarianz ermöglicht und Prozess-Sicherheit ab Stückzahl 1 sichergestellt.
Neben 1K-Materialien aus Kartuschen, Hobbocks und Fässern können mit der richtigen Ventiltechnik ebenfalls 2K-Materialien appliziert werden. Mit der optionalen Nadelvermessung zum automatisierten Einpflegen von offset-Werten wird die gleichbleibende Präzision auch nach dem Kartuschen-Wechsel sichergestellt.
Handlings- und Fügeaufgaben können über die Igus Robot Control (IRC) programmiert werden. Der DXF-Import stellt zukünftig eine noch einfachere Möglichkeit dar, komplexe 2D-Konturen schnell in einem Dosier-Programm umzusetzen.
Der ScrewRover soll mittels Einsatzes modernster Technologien die Schrauben von Rollfeld-Leuchten auf den Start- und Landebahnen autonom nachziehen. Um die Schrauben festzuziehen, wird einen Protalroboter mit einem 3D gedruckten Akkuschrauber Tool verwendet. Durch den Vison-Sensor, werden mittels einer KI (Machine Learning) die Schrauben und dessen genauen Positionen erkannt. Diese Daten werden an die Robotersteuerung gesendet, wodurch diesen Koordinaten durch das igus Robot Control Programm nach einander exakt angefahren und nachgezogen werden.
Um von einer zur nächsten Rollfeld-Leuchte zu kommen, wird ein eigens entwickeltes rein elektrisches Fahrzeug verwendet. Dieses besteht aus 4 Motoren und einer selbst entwickelten mechanischen Lenkung, welche durch einen Servomotor gesteuert wird. Das Grundgerüst des Fahrzeugs besteht aus Aluminiumprofilen, die eine einfache Demontage für den Transport ermöglichen und dabei helfen das Projekt kostengünstig zu gestalten. Der Prototyp wird mittels einer Fernsteuerung grob über einer Leuchte positioniert und schraubt dann autonom die Schrauben fest.
Anwendung: Ziel war es, eine Anlage zu bauen mit der verschiedene Oberflächenbehandlungen automatisch durchgeführt werden können.
» Vollautomatische Durchführung mehrstufiger nass-chemischer Prozesse inkl. Spül- und Trockenschritte
» Auslegung für chemische und elektrochemische Behandlungsschritte
» Flexible Kombination unterschiedlicher Tauchbäder z.B. auf wässriger und organischer Basis
Anwendungsbeispiele
» Optimierung bestehender nasschemischer Prozesse, z.B. beizen oder phosphatieren
» Entwicklung alternativer Beschichtungssysteme für spezifische Anwendungszwecke
» Inklusive der Möglichkeit galvanischer Oberflächenbehandlungen

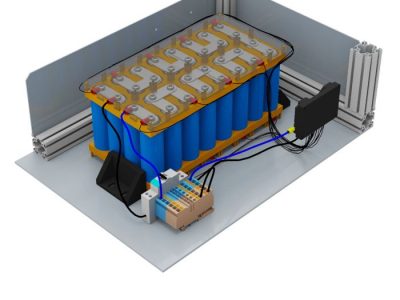
Das innovative Deeptech Startup VOLTERIO hat sich zum Ziel gesetzt den Ladevorgang von Elektroautos zu revolutionieren, durch ein vollkommen automatisches Ladesystem. Der VOLTERIO Laderoboter wurde in enger Zusammenarbeit mit den weltweit führenden Premium-Automobilherstellern entwickelt und stellt automatisch eine konduktive Verbindung zu einer neuartigen Schnittstelle am Fahrzeugunterboden her um jederzeit automatisch zu Laden. Das Fahrzeug muss nur ungefähr über dem sehr flachen und kompakten Laderoboter geparkt werden. Das System bietet nicht nur einen enormen Komfortgewinn für alle Nutzer von Elektromobilität, da das umständliche Hantieren mit Kabeln der Vergangenheit angehört sondern ist zukünftig eine zwingend notwendige Schlüsseltechnologie sobald autonom fahrende Autos und Robotaxis die Straßen erobern.
Ziel des Projektes im Rahmen unserer Diplomarbeit ist, ein mobiles Robotersystem mit Greifer zu entwickeln, um Handling-Aufgaben aus der Entfernung zu ermöglichen. Dazu wird ein mit Sensorik ausgestatteter Handschuh entwickelt, der eine intuitive Steuerung durch Gesten ermöglicht.
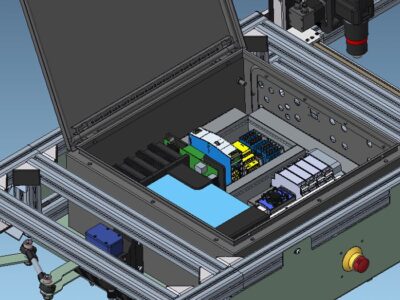
Für das Robotersystem wird ein Antriebssystem sowie ein Akkusystem entwickelt, außerdem muss ein mechanisches Gerüst hergestellt werden, in dem alle Komponenten untergebracht werden. Für die Steuerung des Systems wird eine speicherprogrammierbare Steuerung verwendet, als Roboter kommt der mit der Artikelnummer "RL-D-RBT-5532S-BC-AE" zum Einsatz.
Der Handschuh wird aus flexiblem Kunststoff mithilfe eines 3D-Druck-Verfahrens hergestellt. Der Handschuh soll ebenfalls akkubetrieben sein und alle nötigen elektronischen Komponenten beherbergen, um die größtmögliche Mobilität zu erreichen.

Ziel war es eine Anlage zu bauen mit der verschiedene Oberflächenbehandlungen automatisch durchgeführt werden können.
» Vollautomatische Durchführung mehrstufiger nass-chemischer Prozesse inkl. Spül- und Trockenschritte
» Auslegung für chemische und elektrochemische Behandlungsschritte
» Flexible Kombination unterschiedlicher Tauchbäder z.B. auf wässriger und organischer Basis
Anwendungsbeispiele
» Optimierung bestehender nasschemischer Prozesse, z.B. Beizen oder Phosphatieren
» Entwicklung alternativer Beschichtungssysteme für spezifische Anwendungszwecke
» Inklusive der Möglichkeit galvanischer Oberflächenbehandlungen