Award ID: 739 Company: Spitzer GesmbH
Allgemeine Informationen
- Datum: 2020-05-26 13:35:13
- Firma: Spitzer GesmbH
- Ansprechpartner: Herr Johannes Schantl
- E-Mail: JSchantl@spitzer.at
- Anschrift: Impulszentrum 1, Vorau
- Telefon/Fax: +43 3337 4110 185 /
- Land: Austria
Beschreibung:
» Vollautomatische Durchführung mehrstufiger nass-chemischer Prozesse inkl. Spül- und Trockenschritte
» Auslegung für chemische und elektrochemische Behandlungsschritte
» Flexible Kombination unterschiedlicher Tauchbäder z. B. auf wässriger und organischer Basis
Anwendungsbeispiele
» Optimierung bestehender nasschemischer Prozesse, z. B. beizen oder phosphatieren
» Entwicklung alternativer Beschichtungssysteme für spezifische Anwendungszwecke
» Inklusive der Möglichkeit galvanischer Oberflächenbehandlungen
Problem:
Es kann auch mit chemischen Mitteln gearbeitet werden, die besondere Schutzvorkehrungen benötigen.
Ziel war es, dies soweit wie möglich ohne großen finanziellen Aufwand zu automatisieren.
Lösungidee:
Der Automatisierungsprozess funktioniert folgendermaßen:
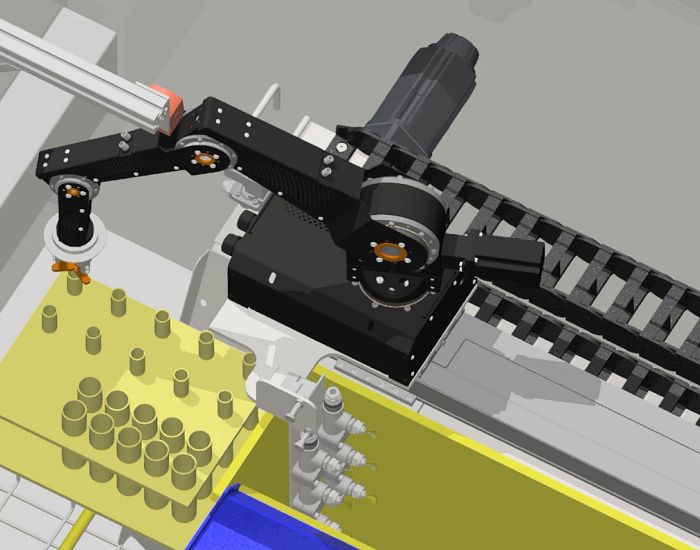
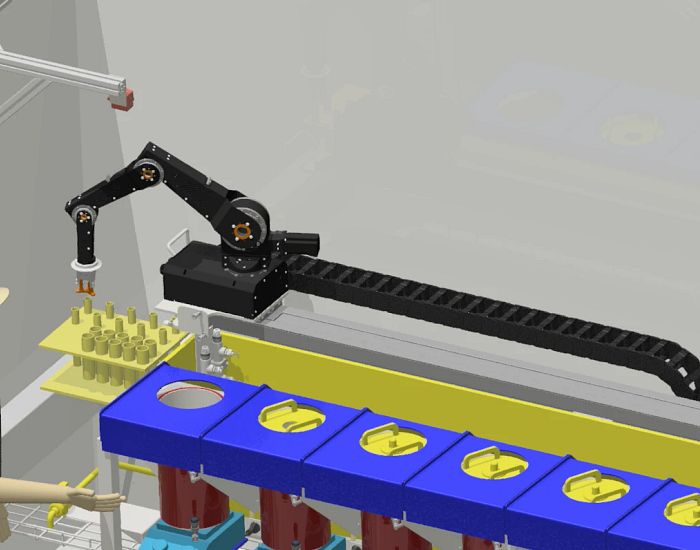
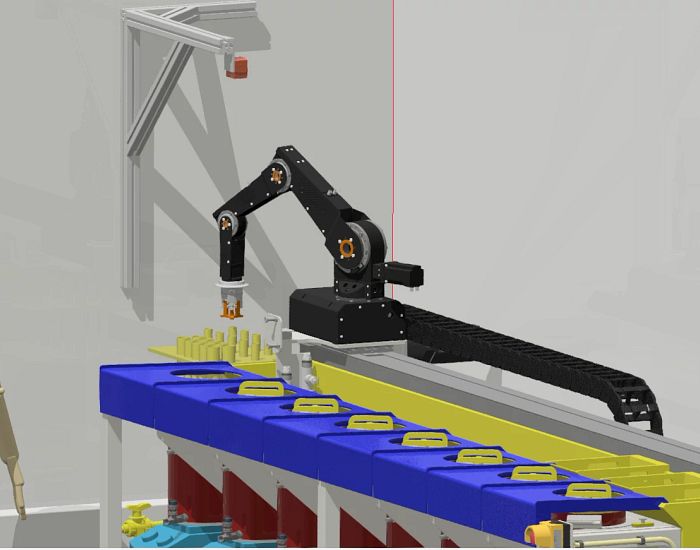
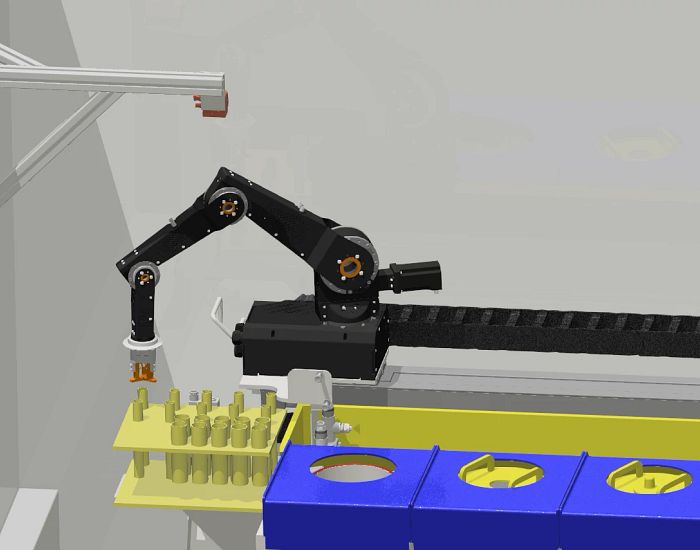
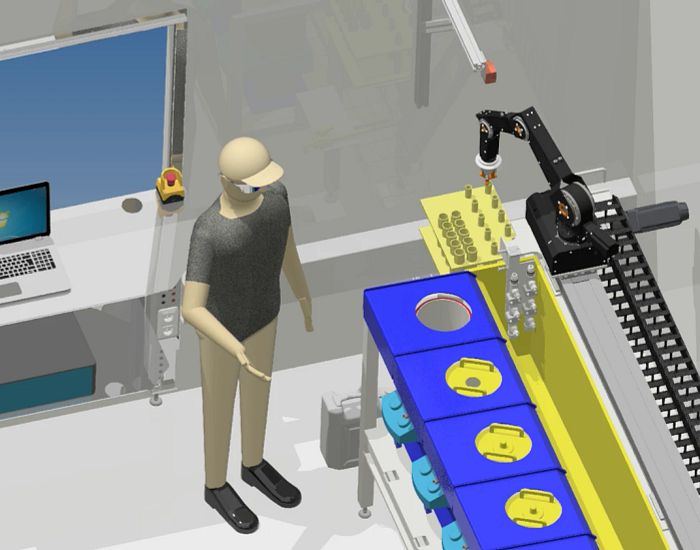
Eine Siemens Simatic ist zuständig für das Hauptprogramm. Dieses steuert die Linearachse und weiter die Position des Roboters, in welches Bad dieser die Proben tauchen soll. Wenn die Badposition erreicht ist, wird ein Subprogramm in der Robotersteuerung aufgerufen, das die Roboterabläufe steuert (Eintauchtiefe, Verweildauer im Bad, erforderliche Reinigungsschritte usw). Dazu gibt es verschiedenste Subroutinen, die abgerufen werden können. Wenn der Roboter mit seiner Routine durch ist, gibt er dies der Siemens weiter und diese agiert, je nach Programm, zum nächsten Bad oder fährt in die Ausgangslage zurück.
// auf den Fotos und Videos ist noch der Testbetrieb zu sehen, der Roboter ist mittlerweile mit einem Schunk Greifersystem versehen und ein Probenlager mit bis zu 10 Proben ist gerade in Arbeit. Es könne in der finalen Version bis zu 8 Proben autark von der Anlage abgearbeitet werden. Die genauen Positionen und Form der Proben wird dem System über eine Objekterkennung übermittelt.