Sevilla
MANUS 2019-02-22 19:25:47
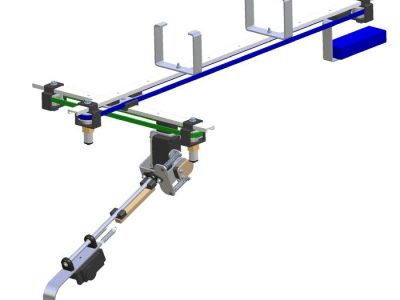
The ability of aerial manipulation robots – drones equipped with robotic arms – to reach easily and quickly remote or high altitude workspaces results of interest for applications related with inspection and maintenance in scenarios like oil and gas refineries, chemical plants, wind turbines, solar plants, or power lines. The operation conducted by an aerial manipulator usually involves some kind of physical interaction with the environment, for example in the execution of grasping tasks, or during the application of contact forces. The estimation and control of the interaction wrenches exerted over the aerial platform in situations like these is necessary to prevent that the stability of the control system is compromised, reducing the risk of collisions and crashes. The design and development of compliant joint manipulators also aims to increase safety during the interactions on flight, exploiting the energy storage capacity and the passivity properties of springs in order to protect the aerial robot against impacts and overloads.