Award ID: 21283 Company: UMS – United Monolithic Semiconductors
Allgemeine Informationen
- Datum: 2024-05-21 08:58:24
- Firma: UMS – United Monolithic Semiconductors
- Ansprechpartner: Monsieur olivier cimino
- E-Mail: Olivier.Cimino@ums-rf.com
- Anschrift: 10 avenue du Quebec, 91140 villebon sur yvette
- Telefon: 611599303
- Land: France
- Awareness:
- Showroom
Application description of the installation
Problem definition
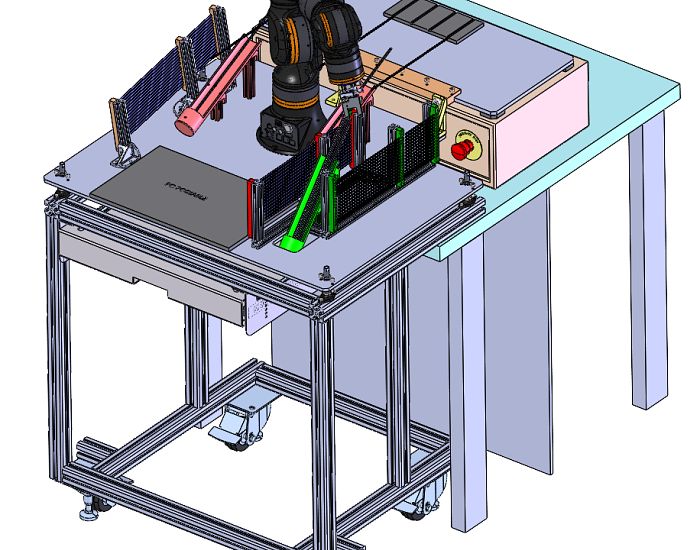
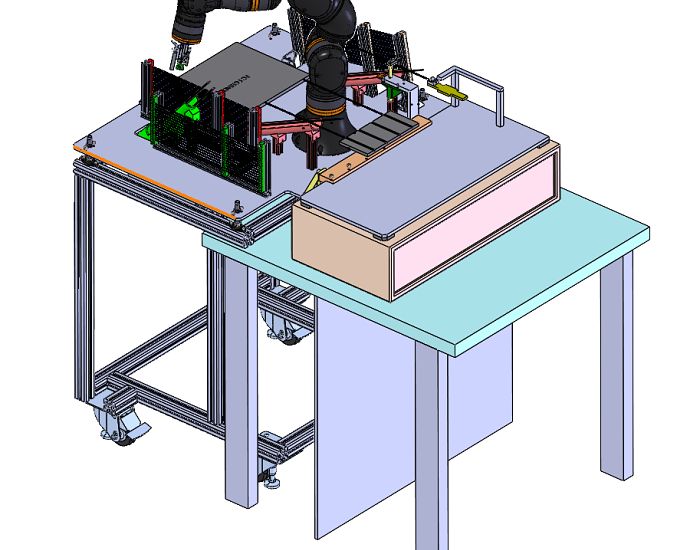
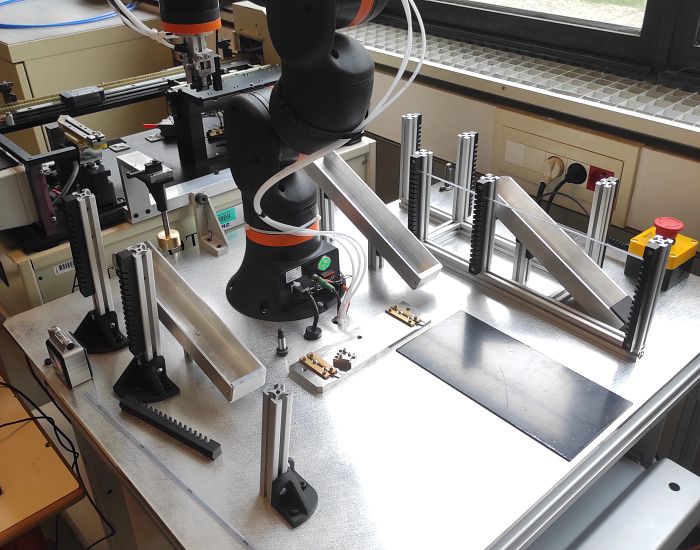
1 Project principle : Automate a WEBtechnology Aetrium semi-automatic machine. https://webtechnology.com/products-services/test-handlers/qt-series/ Loading tubes filled with QFN, unloading tubes filled with QFN OK under test and unloading tubes filled with QFN NG under test.
2.Physical vision of the project : The assembly must be on a mobile forklift truck to compensate for the height of the workstations on which the Aetriums are installed; this must be adjustable in level to compensate for floor defects. The unit must be lockable to the Aetrium. As the assembly blocks the keyboard and mouse of the production PC, a keyboard and mouse must be integrated to continue working on the production PC. The assembly must include a board for electrical, pneumatic and IT connections from the UMS network.
3.Vision of project use: The UMS production technician installs the cart, performs the upgrades and locks the unit to the Aetrium. Connects to the UMS network and production computer. He sets up the PC dedicated to the robot. Fills tube magazines. Starts up the system and checks that it is operating correctly during a cycle.
4.functionalities
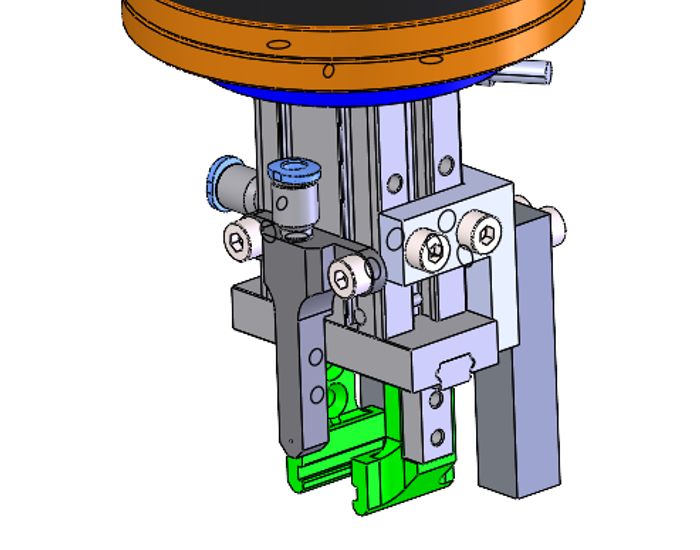
4.1 Gripper features : The gripper must be able to grip several tube sizes without mechanical changes. The gripper must not damage the QFNs in the tubes. The gripper must be able to insert, uninsert and transport tubes without losing QFNs. The gripper must be as short as possible to avoid excessive leverage on the robots last axis (mechanical play). The gripper must have parallel jaws, with a fixed jaw if necessary. One of the jaws must have an internal channel to blow out the components before uninserting the tubes.
4.2 Robot functionality : The robot must be able to access the loader station and the two unloader stations with the tubes. The robot must be able to access the unloading stations. The robot must be able to access the loading stations.
4.3 Unloading station functions : The unloading stations are simple inclined boxes to avoid tube bounce and QFN ejections.
4.3 Loading station features : Loading stations must accept all tube sizes without mechanical changes. The greater the number of tubes available, the better.
4.4 PC functionality : The PC controlling the robot must be able to communicate with : The production station (component wait signal, green tube full, red tube full), our TME department must work on communication) Control the solenoid valves (gripper and blowgun) via the robots I/Os. The PC will be supplied by our IT department, with some requirements. 4.4 Robot software features: Tube size must be selectable We need to be able to pause the robot to reload tubes. It would be interesting to create an exclusion zone, so that the robot can never come into contact with the Aetrium head. In the event of an error, mechanical forcing, or waiting too long for communication, it would be a good idea for the software to open a POP UP. It would be interesting to have presence sensors on the three stations to check whether a tube is present or not. The program should have very descriptive commentary lines to help in the future if any alterations or changes need to be made. Communication with the production PC, to retrieve information on tube ok full, tube NG full, and pending measurement.
4.5 Possible features : Install a blower on the loader attached to the machine (SMC estimate in progress). Installed on all sensors to check that tubes are positioned on the loader and unloader.
Contraintes à détailler plus tard:
Limitation en taille de lautomatisation.
Interaction avec facilities, IT, TME, et production.
Capacité a utilisé plusieurs tailles de tubes.
Facilité de mise en place mécanique avec le moins dactions possible.
Facilité de mise en place informatique avec le moins dactions possible.