Deutschland


provide technical support in identifying and finding the required cable.
Makeathon 2024

Real time hand gesture mimicking to control the gripper and real time position mimicking

Der Rebel holt die Wellen aus einem Magazin und legt diese in einer pneumatischen Wellenspannvorrichtung ab. Anschließend holt er die O-Ringe mittels O-Ringgreifer aus dem O-Ring Magazin. Die O-Ringe werden über einen Ringförderer bereitgestellt.
Danach wird die korrekte Montage der O-Ringe über eine Kamera geprüft. Die Gutteile werden in der IO-Box abgelegt, die Schlechtteile in eine n.I.O Box.
Der gesamte Prozess wird über die Robot Control gesteuert.

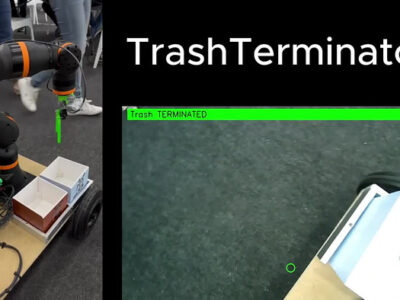
Im Rahmen des Makeathons auf Gran Canaria wurde der Prototyp eines IGUS-Roboters zum Müll sammeln entwickelt. Ein IGUS Rebel Roboterarm wurde auf einem selbst entwickelten Fahrzeug montiert und kann mittel einer Kamera und Computer Vision Müll erkennen. Dieser Müll kann dann mit Künstlicher Intelligenz erkannt werden (z.B. ob es Plastik, Papier oder Metall ist). Anschließend wird der Müll je nach Kategorie in einen entsprechenden Behälter sortiert.

Bei der Applikation handelt es sich um das Beladen von Maschinen, was heutzutage vorrangig von Menschen durchgeführt wird. Hierbei werden häufig Objekt vormontiert, und dann in eine Maschine, wie z.B. einer Presse, geladen und von der Maschine bearbeitet. Die Maschine wird jedoch mit unterschiedlichsten Bauteilen bzw Geometrien beladen, dass eine Flexibilisierung der Automatisierungslösung im Vordergrund steht.

Messeexponat: Der ReBeL verfährt auf einer Hubsäule und auf einer horizontalen Linearachse.
Ausgangssituation
Zurzeit werden ca 5000 gleiche Kleinverteiler pro Jahr gebaut.
Dazu werden Klemmen und Automaten von aktuell von Hand auf eine Tragschiene gesteckt und anschließend verdrahtet.
Aufgabenstellung
Da es eine sich wiederholende Tätigkeit ist, besteht der Wunsch das Bestücken zu automatisieren.