España

Dispensing robot for pharmacies. Dispenses quickly and efficiently with only 2 motors any type of medicine box.

AUTOMATIC CUT-OFF SAW FOR CUTTING ROCK SAMPLES. WE WERE LOOKING FOR A PRECISE, FAST AND EFFICIENT CUT, WITH A MAXIMUM OF OPTIONS THAT SIMPLIFY THE OPERATORS WORK (LESS PHYSICAL WEAR AND TEAR), AND INCREASE HIS PRODUCTIVITY. ALSO SOUGHT MATERIALS CAPABLE OF WITHSTANDING VERY HUMID, SALINE AND DUSTY ENVIRONMENTS (RESULTING FROM ROCK CUTTING).
Manus 2017
StudiBel 3D 2.0 large-format 800x600x700 cm print volume printer, with high features for experienced users who want to exceed low cost small format. The printer is designed and built entirely with igus® components on all mobile devices. Contains mono-square rail guides on the Z-axis, double-square rail linear guides with four-bearing carriage, plastic bearings in tensioners and bearings, cylindrical and adjustable drylin® bearings in steel axes in the extruder head. It also assembles trapeziodal spindles with two-screw flange nut. (In the current version a threaded rod is used)
MANUS 2017
The project consists of the design and manufacture of a mini CNC machine, used to manufacture electronic
circuits. Its main singularity is its small size, which allows it to be portable and to work on desk top. At the
same time, this type of machines are very cost-effective, so they can easily become popular among the nonprofessional
users. The bearings are used in the axes X, and Z
MANUS 2019-02-22 19:25:47
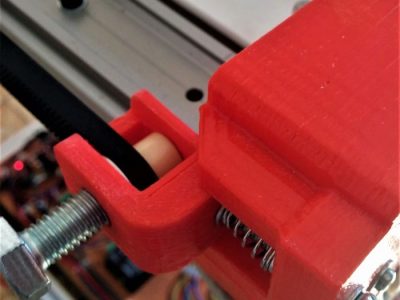
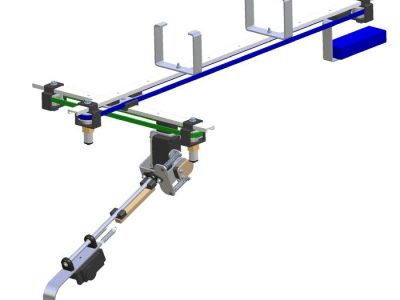
The ability of aerial manipulation robots – drones equipped with robotic arms – to reach easily and quickly remote or high altitude workspaces results of interest for applications related with inspection and maintenance in scenarios like oil and gas refineries, chemical plants, wind turbines, solar plants, or power lines. The operation conducted by an aerial manipulator usually involves some kind of physical interaction with the environment, for example in the execution of grasping tasks, or during the application of contact forces. The estimation and control of the interaction wrenches exerted over the aerial platform in situations like these is necessary to prevent that the stability of the control system is compromised, reducing the risk of collisions and crashes. The design and development of compliant joint manipulators also aims to increase safety during the interactions on flight, exploiting the energy storage capacity and the passivity properties of springs in order to protect the aerial robot against impacts and overloads.