German

Bei diesem Projekt soll ein Roboter auf innovative Weise gesteuert und programmiert werden. Dafür wird ein Sensor verwendet, der eine menschliche Hand im dreidimensionalen Raum tracken kann. Der Sensor erkennt die Position, Ausrichtung sowie Beschleunigung jedes einzelnen Fingers.
Es wurde ein Programm entwickelt, welches die Daten des Handsensors nutzt, um Gesten und Bewegungen zu erkennen. Damit können alle wichtigen Funktionen einer Roboterkinematik abgebildet werden. In Echtzeit werden auf Basis dieser Informationen vom Roboter ausführbare Befehle erzeugt. Von maximaler Geschwindigkeit bis zur sehr präzisen Ausrichtung kann der Roboter auf diese Weise kontrolliert werden. Auch ein angeschlossener Greifer lässt sich mit Gesten ansteuern.
Die durch die Handsteuerung angefahrenen Punkte werden gespeichert, um so die Abläufe später automatisch wiederzugeben. Auf diese Weise lässt sich ein Roboter programmieren, ohne eine einzige Codezeile schreiben zu müssen.
Dieses Projekt wurde am Beispiel des igus robolink (RL-DCi-5S-M) umgesetzt.


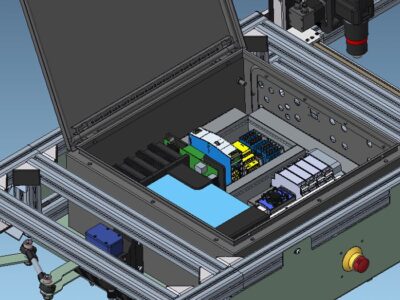
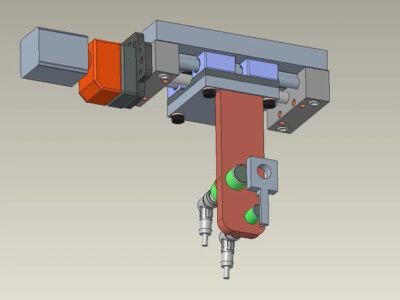
Die Anlage dient dem Vergießen von elektronischen Baugruppen mit zweikomponentiger Polyurethan-Vergussmasse. Die Vergussmasse umschließt die Elektronik vollständig und schützt so vor Staub und Feuchtigkeit. Die Anlage besteht aus einem Kesselwagen zur Lagerung, Temperierung und Vakuumierung der beiden Komponenten sowie dem Dosierkopf zur Abgabe der Komponenten im korrekten Mischungsverhältnis in ein statisches Mischrohr. Am Auslauf des Mischrohres läuft die Vergussmasse in das Gehäuse der elektronischen Baugruppe.

Entnahmesystem für eine BOY 35 E. Durch die kompakte Integration der igus Automatisierungskomponenten konnten wir diese ohne Vergrößerung der Aufstellfläche integrieren und vollumfänglich über unsere Steuerung einbinden –> Ansteuerung erfolgt über die BOY Procan ALPHA 6 Steuerung mittels bekannter Symbolik und alles wird zusammen mit den Datensatz für den Spritzgießprozess abgespeichert. Die igus Automatisierungskomponenten werden hier nicht nur für die Entnahme der Spritzgussteile genutzt, vielmehr erfolgt direkt im Anschluss noch ein Montageprozess – alles platzsparend unter der BOY Schutzhaube

Our project is aim to develop an intelligent, automated and networked water quality laboratory testing product. The system is composed of a fully automatic water quality analyzer, a robot sample loading and unloading system, a sample transfer system, an automatic sample injection module, a central control system, and auxiliary systems. It can realize fully automated, batched and unattended testing of multiple water quality parameters, which can improve the efficiency and capacity of water quality testing, the accuracy and reliability of testing, reduce costs, and ensure the traceability of data.
What was needed: HSQ Lift/swivel unit
Medical_Laboratory Devices_Lab-Analyzers,22060_003_105
Der ScrewRover soll mittels Einsatzes modernster Technologien die Schrauben von Rollfeld-Leuchten auf den Start- und Landebahnen autonom nachziehen. Um die Schrauben festzuziehen, wird einen Protalroboter mit einem 3D gedruckten Akkuschrauber Tool verwendet. Durch den Vison-Sensor, werden mittels einer KI (Machine Learning) die Schrauben und dessen genauen Positionen erkannt. Diese Daten werden an die Robotersteuerung gesendet, wodurch diesen Koordinaten durch das igus Robot Control Programm nach einander exakt angefahren und nachgezogen werden.
Um von einer zur nächsten Rollfeld-Leuchte zu kommen, wird ein eigens entwickeltes rein elektrisches Fahrzeug verwendet. Dieses besteht aus 4 Motoren und einer selbst entwickelten mechanischen Lenkung, welche durch einen Servomotor gesteuert wird. Das Grundgerüst des Fahrzeugs besteht aus Aluminiumprofilen, die eine einfache Demontage für den Transport ermöglichen und dabei helfen das Projekt kostengünstig zu gestalten. Der Prototyp wird mittels einer Fernsteuerung grob über einer Leuchte positioniert und schraubt dann autonom die Schrauben fest.
Application use 7th axis with lenght 2500 mm stroke with Universal Robot for capture part of parts before and after checking for get result Ok or NG the Car.
Before use 7th axis with UR robot they use man power for checking parts manually point per point parts Ok or NG result
Bestücken und Vorverdrahten eines Kleinverteilers mittels Roboter
For fine adjustment of servo motor homing to synchronised with main servo in our application we are used your components. also to adjust different diameter pre-formed cup size. some component we are used from IGUS.

Im Rahmen unserer Weiterbildung zum staatlich geprüften Techniker in der Fachrichtung Automatisierungstechnik und Mechatronik an der Wilhelm-Maybach-Schule in Heilbronn haben wir innerhalb von neun Monaten unsere Technikerarbeit umgesetzt. Unser vierköpfiges "IGUS-Robi-Team" entwarf ein Lehrmittel, das Schülern in verschiedenen Schularten, wie Berufskollegs und Berufsschulen, den Einstieg in die Welt der Automatisierung und Mechatronik erleichtern soll. Die zentrale Aufgabe bestand darin, dass der Lehrmittelwagen sowohl allen technischen Anforderungen als auch den pädagogischen Bedürfnissen gerecht wird. Die Hauptkomponente des Projekts ist eine robuste Aluprofilkonstruktion, die als Plattform für einen modernen 5-Achs-Roboter von IGUS dient. Dem Anwender steht eine B&R-Steuerung, verbunden mit einer Computerschnittstelle zur Verfügung.
https://www.youtube.com/watch?v=I89n0J5cuuE