België

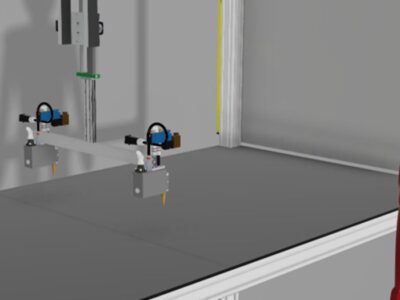
Application description of the system Thesis Warre Hannes and Louis Segers: "Digital twin of a delta robot for sorting packaging materials" Abstract: Sorting packaging materials is an essential aspect of recycling processes, especially in remote areas where access to traditional facilities is limited. Designing portable, robotic Material Recovery Facilities is therefore vital. This research focuses on developing a digital twin that accurately matches its physical counterpart. Eventually, different machines can be proposed from this for separating various types of waste. To achieve this goal, a keops delta robot has been employed as a physical representation for the digital version. The robots kinematics is integrated to control the robot and allow it to sort different test cubes. Next, the digital twin is validated by comparison to the physical setup.
Once the digital twin can accurately mimic the physical setup, adjustments can be made to the digital delta robot. Based on this, conclusions can be drawn and a range of machines can be proposed for sorting various types of waste. This range of machines is determined by adjustments to the arms, end-effectors and size of the robot. This research illustrates the value of a digital twin in detecting potential problems in the machine without performing physical tests. Moreover, a digital twin can also be invaluable during the design phase of a new machine, allowing early progress in programming and analysis of the setup. A notable aspect of this research is the presence of a physical representation unlike many other studies. This increases the credibility and usability of the digital twin for future applications in the sorting industry.
+++Neu mit Video+++
English: https://vimeo.com/399837065
Dutch: https://vimeo.com/398824339
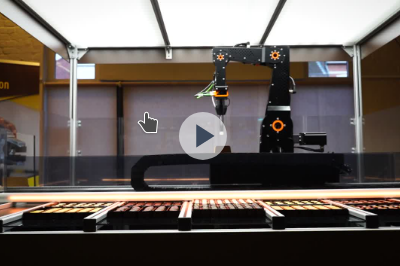
Anwendung: The designed project "Chocomatic" serves as an automatic pralinetone bench equipped with an IGUS robotic arm mounted on an IGUS guidance where the customer is operated by a robot that he can control via a tablet or his own smartphone to put together his range of chocolates and fill his box with sweets.
These applications are built around interaction between the customer and the robot.
The employees of the shop where a robot is located do not need any training and do not have to do delicate operations. The robot works full "standalone" all one has to do is refill the chocolates and press start.
The robot, equipped with a camera on the tool, is going to take a picture of all pralines from which it will teach itself where each type of praline is located. Then the robot will measure the height of each type of praline to be used later when filling a box of chocolates. For each praline that the customer asks for, a photo is first taken in order to find out the exact position of the desired praline and thus take the praline perfectly in the middle and place it in its box. The robot also takes into account the position of each praline in the box, e.g. the robot will not immediately put difficult round chocolates away in the box, but first look at what comes next to decide when it is suitable to place them.
When, for example, there are no more pralines of a type present, the customer will no longer be able to select them and the employees will receive a notification asking them to refill that type of praline. This development offers excellent service for the customer and optimal ease of use for the employee where no technical knowledge is required.
Applying with new Video!!
Using a Beckhoff-PLC to control a 4-axis IGUS-robot using the new kinematic transformation libraries.
The goal is constructing a demo pick-and-place system for IGUS to be used at demofairs. Keep in mind that this a schoolproject that has to be finished by the end of june so the demo is no fully functional yet. For now the robot can pick up one item and place it in a holder. The full system will be able to pick up four items of different colours and place it in four different holders.

Pick and place application with igus APIRO robot in a SCARA configuration