German
Ziel des Projektes im Rahmen unserer Diplomarbeit ist, ein mobiles Robotersystem mit Greifer zu entwickeln, um Handling-Aufgaben aus der Entfernung zu ermöglichen. Dazu wird ein mit Sensorik ausgestatteter Handschuh entwickelt, der eine intuitive Steuerung durch Gesten ermöglicht.
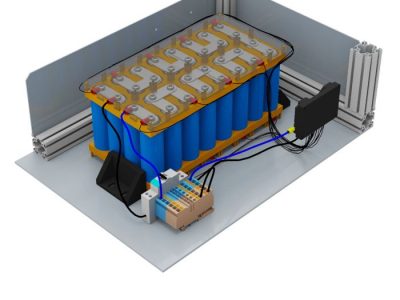
Für das Robotersystem wird ein Antriebssystem sowie ein Akkusystem entwickelt, außerdem muss ein mechanisches Gerüst hergestellt werden, in dem alle Komponenten untergebracht werden. Für die Steuerung des Systems wird eine speicherprogrammierbare Steuerung verwendet, als Roboter kommt der mit der Artikelnummer "RL-D-RBT-5532S-BC-AE" zum Einsatz.
Der Handschuh wird aus flexiblem Kunststoff mithilfe eines 3D-Druck-Verfahrens hergestellt. Der Handschuh soll ebenfalls akkubetrieben sein und alle nötigen elektronischen Komponenten beherbergen, um die größtmögliche Mobilität zu erreichen.

Ziel war es eine Anlage zu bauen mit der verschiedene Oberflächenbehandlungen automatisch durchgeführt werden können.
» Vollautomatische Durchführung mehrstufiger nass-chemischer Prozesse inkl. Spül- und Trockenschritte
» Auslegung für chemische und elektrochemische Behandlungsschritte
» Flexible Kombination unterschiedlicher Tauchbäder z.B. auf wässriger und organischer Basis
Anwendungsbeispiele
» Optimierung bestehender nasschemischer Prozesse, z.B. Beizen oder Phosphatieren
» Entwicklung alternativer Beschichtungssysteme für spezifische Anwendungszwecke
» Inklusive der Möglichkeit galvanischer Oberflächenbehandlungen

Die verfahrbare Lupe wird fester Bestandteil im Märklinmuseum "Märklineum" in Göppingen.
Das Museum steht kurz vor der Fertigstellung. Aufgrund der derzeitigen Situation ist die Eröffnung auf Herbst verschoben worden.
Ein Probeaufbau mit vollständigem Funktionstest ist Ende April bei der Simba Dickie Group geplant. Falls es zeitlich noch möglich ist, kann ein Video nachgereicht werden.
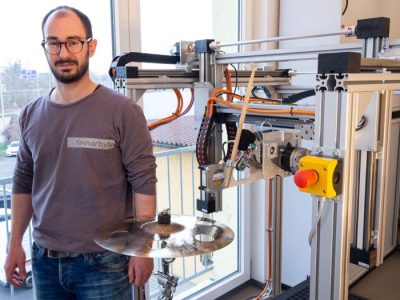
Mit der von feinarbyte entwickelten Anlage werden Schlagzeug-Becken mit einheitlicher Schlagkraft an definierten Stellen angespielt. Um vergleichbare Anschlagwinkel zu erreichen, wird die Kontur aller Becken zu Beginn optisch vermessen. Pro Anschlag wird automatisch eine Tonaufnahme erstellt.

Automatische Scheibenreinigung an einem Aquarium welche mit zwei Linearführungen über einen Zahnriemen parallel angetrieben werden. Eine integrierte Steuerung mit App Anbindung regelt die täglichen Bewegungszeiten und steuert die Abläufe sowie die Sicherheitsfunktionen.

Badspiegelschrank ausgestattet mit Soundanlage und im Spiegel integrierter TV sowie Wetter App.
Das Highlight ist die elektrische Höhenverstellung des Spiegels (siehe Bilder und Werbevideo).
Die Höhenverstellung wird angetrieben mittels einer Zahnriemenachse mit Schrittmotor der Fa. Igus. Die Außenlagerung des Spiegels erfolgt mit Drylin W Schienen und den zugehörigen Gehäuselagern.

Eine Abfüllanlage zur Verarbeitung von Kunststoffflaschen mit einem Volumen von 50 bis 150 ml. Ein Mitarbeiter legt Flaschen und Verschlüsse aus einem ungeordneten Karton auf ein Stauband, von dem aus sie in die Maschine zugeführt werden. Dort werden die Flaschen befüllt, etikettiert und der Verschluss aufeschraubt. Anschließend werden die fertigen Produkte von einem weiteren Mitarbeiter verpackt. Die Taktzeit liegt bei einigen Sekunden.
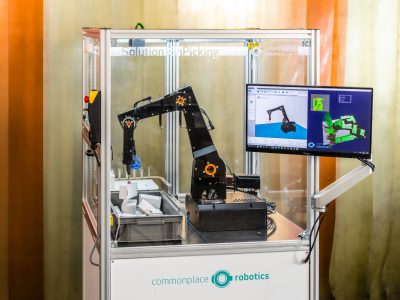
Die „Solution Griff-in-die-Kiste“ Anlage entnimmt Teile aus einer Lagerbox und gibt sie an den nächsten Verarbeitungs- oder Verpackungsprozess weiter. Sie besteht aus:
• Roboterarm igus robolink mit Steuerung zum Handhaben der Bauteile. Es können auch Portale oder Delta-Roboter verwendet werden.
• Sensor zur Erstellung eines 3-D Bildes der Teile in der Lagerbox
• Auswertesoftware um aus dem 3D-Bild eine Greifposition zu erzeugen
• Sicherheits-SPS mit Tür- und Positionsschaltern
• Roboterzelle aus Aluminiumprofilen
Vom Bediener wird eine Kiste voller Teile eingelegt, etwa Spritzgussteile oder Medikamentenschachteln. Er startet den Prozess, der Roboter räumt nun vollautomatisch die Kiste leer. Der Ablauf erfolgt in 4 Schritten:
1. Der Sensor erzeugt ein 3-D Bild von den in der Kiste liegenden Teilen, eine sogenannte Punktewolke. Darin ist die Oberfläche der Teile sichtbar.
2. Die Auswertesoftware erkennt in der Punktewolke die Teile. Dies kann auf der Basis von ebenen Flächen oder auf der Basis von CAD-Daten erfolgen.
3. Es wird automatisch ein gut zu greifendes Teil ausgewählt, meist das zu oberst Liegende. Für dieses Teil wird der beste Greifpunkt berechnet und zur Robotersteuerung geschickt.
4. Der Roboter greift das Teil und legt es an einer Übergabeposition ab. Sobald der Roboterarm den Platz über der Kiste verlassen startet der nächste Durchlauf.
Die zu greifenden Teile können entweder als Quader mit definierten Kantenlängen, oder als CAD-Datei eingelernt werden. Das Greifen der Teile erfolgt mit einem Vakuumsauger oder einem normalen Greifer.
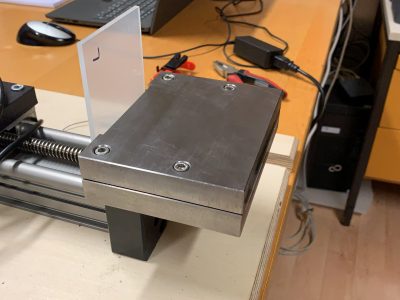
Prüfstand zur automatisierten Festigkeitsmessung verschiedener Klebeverbindungen
Die Firma Glaskeil stellt u.a. Bauteile und Komponenten aus Kunststoff her. Überwiegend werden klare Kunststoffe bearbeitet und verbaut. Einsatzgebiete sind die Bau- und Möbelindustrie, Bootsbau, Werbetechnik und viele weitere Bereiche. Häufig ist es erforderlich, dass Bauteile miteinander verklebt werden müssen. Diese Klebeverbindungen sollen vorab getestet und somit z.B. Materialkombinationen freigegeben werden.
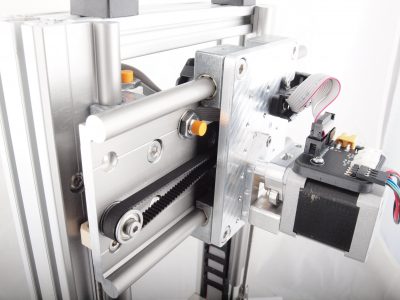
Es handelt sich um einen kompakten, portablen hochpräzisen FDM (Fused Deposition Modeling) 3D-Drucker. Das Gerät versteht sich als kartesischer Roboter, der durch schichtweises Verschmelzen von Kunststoff en Werkstücke fertigt. Ziel war es einen 3D-Drucker zu entwickeln, der kleine Werkstücke hochpräzise und schnell bei gleichzeitig niedrigem Anschaffungspreis fertigen kann. Der Bauraum des Gerätes beträgt 120mm x 100mm x ca. 120mm (B/T/H). Durch ein perfektes Zusammenspiel von Elektronik und Mechanik ist eine Auflösung von 1.280 Schritte pro Millimeter auf X und Y sowie bis zu 64.000 Schritte pro Millimeter auf der Z-Achse möglich. Das eigens entwickelte Merlin Mini Hotend wiegt lediglich 4,6g und kann mit einem Düsendurchmesser von 0,2mm genutzt werden. Der Drucker kann herstellerunabhängig nahezu alle gängigen Kunststofffilamente verarbeiten.